«Врачи-нанороботы» — миф или реальность?
14 октября 2016
«Врачи-нанороботы» — миф или реальность?
- 10038
- 1
- 3
Представьте то время, когда введенные в организм человека наномашины смогут вылечить смертельные заболевания или даже приблизить бессмертие. Ученые считают, что через десятилетия это будет обычным делом. А как думаете вы?
-
Автор
-
Редакторы
Статья на конкурс «био/мол/текст»: В книге «Машины создания» американского ученого Эрика Дрекслера была рассмотрена идея создания наноробота как «машины по ремонту клеток», которая смогла бы ставить диагноз, передавать информацию и создавать программу для лечения человека. Конечно, это звучит очень фантастично, но ученые уверяют, что в будущем такие «машины-нанороботы» помогут людям жить вечно: они смогут предотвратить множество болезней, излечиться от уже имеющихся и таким образом приблизиться к бессмертию. То, что это вполне возможно, доказывают современные научные исследования, а вот будет ли это доступным всем — совсем другой вопрос.
«Био/мол/текст»-2016
Эта работа опубликована в номинации «Бионанотехнология» конкурса «био/мол/текст»-2016.

Спонсор номинации — Фонд инфраструктурных и образовательных программ Роснано.
Генеральным спонсором конкурса, согласно нашему краудфандингу, стал предприниматель Константин Синюшин, за что ему огромный человеческий респект!
Спонсором приза зрительских симпатий выступила фирма «Атлас».
Около 20 000 лет тому назад человек
начал одомашнивать растения и животных.
Сейчас наступило время одомашнивать молекулы.
Сьюзан Линдквист.
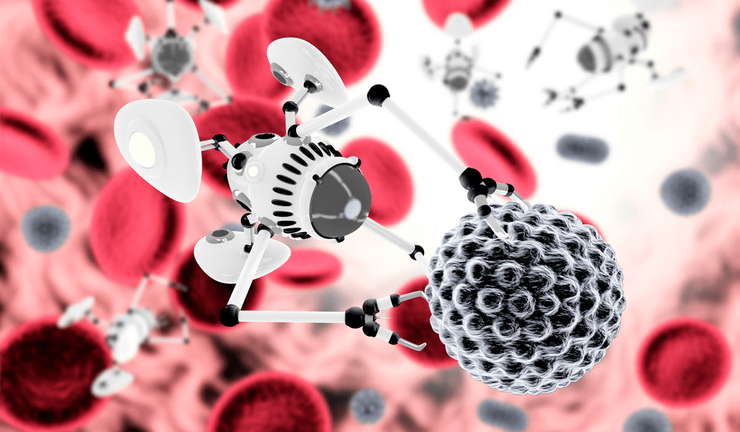
Представьте, что вы заболели обычной простудой и направляетесь к врачу за лечением, но вместо того, чтобы выписать вам таблетки или укол, он направляет вас в медицинский центр, который «запустит» в вашу кровь крошечных роботов. Они обнаружат причину заболевания, отправятся в нужную систему органов и доставят необходимую дозу лекарственного препарата непосредственно в «зону поражения». Вы удивитесь, но современная медицина не так уж и далека от таких устройств, которые уже отчасти используются. Эти специфические устройства названы нанороботами, которые создаются на основе наноэлектронных структур и биотехнологий и приобретают новые физико-химические свойства, отличающиеся от составляющих их молекул и атомов [1]. Такие нанороботы будут способны функционировать в организме человека и выполнять разнообразные функции: от контроля молекулярных и клеточных процессов до диагностики и «ремонта» организма изнутри.
Наномедицина — что это?
Окружающий нас мир меняется все быстрее и быстрее, и реальным становится то, что раньше было лишь вымыслом футурологов. Наномедицина и нанотехнологии коренным образом меняют взгляд человека на окружающий мир. О наномедицине, способной показывать человеку «чудеса» регенерации, решать проблемы биологического старения и многое другое, можно говорить, как о новой вехе в развитии современной науки.
По определению Роберта Фрейтаса: «Наномедицина — это слежение, исправление, конструирование и контроль над биологическими системами человека на молекулярном уровне с использованием разработанных наночастиц и наноустройств» [2]. Возникновение наномедицины связывают с 1957 годом, когда будущий лауреат Нобелевской премии Ричард Фейнман прочитал лекцию в калифорнийском технологическом институте и произнес свою знаменитую фразу: «Внизу полным полно места» [3]. Он указал мировому сообществу, что, несмотря на фундаментальные знания о микромире, человечество не умеет использовать все свои возможности для продуктивной работы в данной отрасли. В то время его слова казались фантастикой, и мало кто мог предположить, что уже через несколько десятилетий появятся технологии, способные работать на молекулярном и атомном уровнях.
«Молекулярные машины»
Один из основоположников нанотехнологических разработок американский ученый Эрик Дрекслер в своих фундаментальных работах описал новую медицинскую технологию — использование «молекулярных машин». Начало развития этого направления можно связать с 1986 годом, когда Эрик Дрекслер опубликовал книгу «Машины создания. Грядущая эра нанотехнологии». Несколько позже, в 1991 году, он защитил докторскую диссертацию, а в 1992 году выпустил монографию «Наносистемы», где были изложены научные основания построения нанороботов — наномашин для ремонта клеток. По его мнению, медицинские нанороботы должны уметь диагностировать заболевания, доставлять лекарственные препараты, циркулировать в лимфатических и кровеносных сосудах человека и даже делать хирургические операции. Дрекслер предположил, что медицинские нанороботы предоставят возможность оживления людей, замороженных методами крионики [4].
Как же создать «конструктор» из атомов и молекул?
До сих пор не существует ни одной методики инженерного проектирования молекулярных структур в виде работоспособных крошечных роботов. Их еще предстоит разработать, но современные достижения науки настраивают на оптимизм: уже созданы моторчики диаметром 500 нм, которые могут использоваться в качестве двигателей для нанороботов , наножидкостные и наноэлектронные системы типа «лаборатории-на-чипе», разработано программное обеспечение для моделирования поведения нанороботов в организме человека. Существует практическая программа исследований, основанная Робертом Фрейтасом и Ральфом Мерклом в 2000 году и направленная на создание алмазной механосинтетической фабрики, которая будет создавать нанороботов на основе алмазных соединений [5].
В 2016 году за разработку молекулярного двигателя Бернарду Ферринге была присуждена Нобелевская премия по химии: «Наноавтомобиль, молекулярный лифт и искусственные мышцы — названы лауреаты Нобелевской премии по химии 2016» [6]. — Ред.
Наряду с нанороботами из алмазоидов, биоинженеры планируют активно создавать нанороботов из клеточных органелл и других биологических объектов: с митохондриями вместо аккумуляторов, миозиновыми волокнами для движения белковых жгутиков, рибосомами для синтеза необходимого белка, антителами для распознавания молекул, молекулами ферментов, вакуолями с самостоятельно синтезированным лекарственным веществом. Фактически это будет искусственно сконструированная живая клетка с заданными функциями [7], [8]. Геномика и протеомика развиваются такими темпами, что получение биологических нанороботов будет эффективным добавлением к механическим нанороботам.
Несмотря на все достижения науки, действующие и эффективные конструкции нанороботов пока не разработаны и находятся на стадии задумок и проектирования. Есть три основных момента, на которых должны сосредоточиться ученые: навигация, питание и передвижение нанитов по кровеносным сосудам. Нанотехнологи рассматривают различные варианты для каждого из этих аспектов.
1. Навигация нанороботов
Внешние навигационные системы могут использовать множество различных методов, чтобы доставить наноробота в нужное место. Один из таких методов — применение ультразвуковых сигналов для обнаружения местоположения наноробота и направления его в место назначения. Врачам отправляли бы ультразвуковые сигналы в тело пациента и регистрировали их, работая на специальном оборудовании с ультразвуковыми датчиками.
Используя магнитно-резонансную томографию (МРТ), врачи могли бы определять местонахождение наноробота и отслеживать его по магнитному полю.
2. Питание нанороботов
В качестве основных источников энергии предполагается использование собственных запасов непосредственно из кровотока человека. Наноробот с установленными электродами может сформировать «батарею» на основе электролитов, найденных в крови. Другой вариант заключается в создании химических реакций с кровью для превращения ее в энергию.
Также существует предположение по дополнению функции митохондрий глюкозным механохимическим реактором.
3. Передвижение нанороботов
В настоящее время уже разработано несколько нанодвигателей различных типов, которые в будущем смогут обеспечить нанороботам перемещение в пространстве. Одним из таких двигателей является диэлектрофорезный наномотор [9]. Работа двигателя построена на процессе притягивания и отталкивания частиц в сильном неоднородном электростатическом поле.
Другой вариант нашли израильские и немецкие ученые из Технологического института Технион (Израиль), Института интеллектуальных систем Макса Планка (Германия) и Института физической химии университета Штутгарта (Германия). В статье, опубликованной в сентябрьском выпуске ACS Nano 2014 года, израильская и немецкая команда объявила, что им удалось создать крошечный винтообразный придаток, который может двигаться в гелеобразной жидкости, имитирующий окружающую среду внутри живого организма [10]. Форма нанопропеллера далека от форм пропеллеров, которые мы привыкли видеть. Исследователи придали своему нанодвигателю форму спирали, которая представляет собой закрученную нить из кварца и никеля. Ширина спирали составляет 70 нанометров, а длина — 400 нанометров. Такие размеры делают спираль нанодвигателя в 100 раз меньше диаметра клетки крови человека. При этом управление происходит за счет переменного магнитного поля, полностью исключающего какие-либо виды облучения человеческого организма. Меняя параметры данного поля, ученые регулируют направление и скорость движения механизма, доставляя его точно в заданную точку тела.
Прототипы нанороботов
С каждым годом микроробототехника существенно продвигается вперед. Только за последнее десятилетие в этой сфере появилось сразу несколько прорывных технологий.
1. ДНК-нанороботы
В 2014 году команда исследователей из Университета Бар-Илан в Израиле опубликовала статью в журнале Nature Nanotechnology, в которой продемонстрировала возможность создания нескольких нанороботов на основе нитей ДНК, которые затем были введены в организм лабораторных тараканов [11]. Эти ДНК-наноботы представляли собой свернутые особым образом и имеющие заданную последовательность молекулы ДНК, которые, попав в среду живого организма, начинали разворачиваться и взаимодействовать друг с другом и с клетками этого организма. Исследователи «размотали» нити ДНК, а затем «связали» их в новую структуру, похожую на «коробку-оригами» . В нее затем поместили по одной химической молекуле (рис. 1). При столкновении с определенными белками «ДНК-коробка» открывалась и высвобождала заключенные в изгибах ДНК химические частички, которые могли действовать согласно заложенной в них программе на процессы жизнедеятельности клеток организма или выступать в качестве лекарственных препаратов. Нанороботы были снабжены метками светящегося материала, благодаря которому было возможно определять их положение в пространстве и следить за перемещением. Во время эксперимента ДНК-нанороботы показали высокую точность функционирования и взаимодействия между собой, граничащую с точностью работы компьютерной программы.
Подробнее метод ДНК-оригами рассматривается в статьях: «ДНК-оригами: путь от гравюры до нанороботов длиной в 30 лет» [12], «Голактеко опасносте: ДНК-роботы в живом организме» [13] и «Биоинженеры научились получать ДНК-структуры, сборкой и разборкой которых можно управлять» [14]. — Ред.

Рисунок 1. Робот представляет собой шестигранную призму, внутри которой спрятан «важный груз» — в данном случае, антитело, способное связываться с клетками крови тараканов. На рисунке — скриншот программы caDNAno, позволяющей моделировать структуру ДНК-оригами и подбирать необходимые для конструкции нуклеотидные последовательности.
2. Наноробот — морской гребешок
Ученые из Института интеллектуальных систем Макса Планка в 2014 году сконструировали необычного микроскопического робота для передвижения по жидкостям человеческого тела. Отличает его от всех прежних прототипов сходство с морским гребешком (рис. 2). Подобно этому моллюску наноробот способен передвигаться за счет движений створок «раковины» с помощью реактивной тяги. При этом роботу достаточно энергии внешнего электромагнитного поля, что позволило обойтись без источника питания и уменьшить размеры раковины [15].

Рисунок 2. «Целебные гребешки». Такой механизм плавания нанороботов из полидиметилсилоксана открывает новые возможности в проектировании биомедицинских микроприборов.
3. «Цинковые наноракеты»
Исследователи из Калифорнийского университета Сан-Диего в 2015 г. создали нанороботов, способных перемещаться внутри живого организма и доставлять груз лекарственных препаратов в необходимое место, не влияя на организм [16]. Микродвигатель этих «молекулярных машин» имеет химическую природу и продвигает наноботов за счет пузырьков газа, выделяющихся в ходе реакции между жидкостью внутри организма и материалом, находящемся в двигателе (рис. 3). Подопытными живыми организмами были грызуны. Наниты, изготовленные из специального полимера, имели форму трубки длиной около 20 микрометров и диаметром 5 микрометров и были покрыты толстым слоем цинка. Нанороботы вводились в пищеварительный тракт животного и достигали его желудка, где цинк начинал реагировать с соляной кислотой, входящей в состав пищеварительных соков. Выделяющийся при этом водород вырывался из внутренней полости трубок-наноботов, превращая их в подобие миниатюрных ракет (видео 1).

Рисунок 3. Устройство цинковых наномоторов. а — Механизм работы «цинкового мотора». б — Построение микродвигателей с помощью поликарбоната. в — Цинковые «наноракеты» под микроскопом. г — Фазы движения нанороботов.
Видео 1. Движение созданного калифорнийскими учеными прототипа наноробота.
Они развивали скорость около 60 микрометров в секунду, были способны покидать пределы желудка и закрепляться на стенках кишечника, где высвобождали наночастицы из лекарственных препаратов. Согласно данным, полученным в ходе эксперимента, наноботы оставались прикрепленными к стенкам кишечника в течение 12 часов, даже несмотря на прием пищи подопытным животным, что является доказательством их эффективности.
4. «Шустрые» наниты
Одним из последних достижений в области наноробототехники является создание исследователями из Университета Дрекселя крошечных роботов, способных развивать большую скорость в жидкой среде [17]. Нанороботы представляют собой цепочки из крошечных круглых частиц. Магнитное поле вращает частицы, подобно винту. При этом, чем длиннее цепочка, тем бóльшую скорость она может развить (рис. 4). Ученые создавали различных роботов: начиная с цепочки из трех «бусин» до цепочки из 13 частиц, которая достигала скорости 17,85 микрометра в секунду (видео 2). Движение наноботов было возможно благодаря применению внешнего магнитного поля. Чем быстрее была скорость вращения поля, тем быстрее перемещались цепочки. При этом высокая частота приводила к деформации цепочек и способствовала их разделению на более мелкие цепочки: из трех или четырех частиц. Ученые планируют использовать эти устройства в будущем для доставки лекарственных веществ по кровеносным сосудам.

Рисунок 4. Скорость магнитных пловцов с различным количеством бусин.
Видео 2. Нанороботы-трансформеры, созданные в Университете Дрекселя, США.
По образу и подобию
Какой станет медицина будущего? Как она изменит нас и наше отношение к жизни? Смогут ли «нанороботы-врачи» заменить человека? Эти вопросы звучат, как нечто фантастическое. Несмотря на то, что конструкция медицинских нанороботов существует пока в головах ученых, уже сейчас можно с гордостью говорить о достижениях нанотехологии в медицине: это и адресная доставка лекарств, и контроль биохимии процесса лечения, и диагностика заболеваний с помощью квантов, и лаборатория на чипе [18].
Ожидается, что достижения в наноробототехнике станут доступными не ранее, через полвека, однако последние разработки в этой отрасли вселяют уверенность в то, что это произойдет намного раньше. Будем надеяться, что через пару веков гений человека сможет на практике использовать нанороботов в хирургических операциях, в лечении разнообразных заболеваний и, в конце концов, для оживления и «ремонта» человека [3].
Литература
- Yamamoto Y., Miura T., Suzuki M., Kawamura N., Miyagawa H., Nakamura T. et al. (2004). Direct observation of ferromagnetic spin polarization in gold nanoparticles. Phys. Rev. Lett. 93, 116801;
- Freitas R.A. Jr. (2005). What is nanomedicine? Nanomedicine. 1, 2–9;
- Feynman R.P. (1960). There’s plenty of room at the bottom. Caltech Engineering and Science. 23, 22-36;
- Дрекслер Э. Машины создания. Грядущая эра нанотехнологии. М.: Издательство «Энкор Букс», 2009;
- Merkle R.C. and Freitas R.A. Jr. (2003). Theoretical analysis of a carbon-carbon dimer placement tool for diamond mechanosynthesis. J. Nanosci. Nanotechnol. 3, 319–324;
- Наноавтомобиль, молекулярный лифт и искусственные мышцы — названы лауреаты Нобелевской премии по химии 2016;
- Борисенко В.Е. (1997). Наноэлектроника — основа информационных систем XXI века. Соросовский oбразовательный журнал. 5, 100–104;
- Синтетическая жизнь;
- Soong R.K., Bachand G.D., Neves H.P., Olkhovets A.G., Craighead H.G., Montemagno C.D. (2000). Powering an inorganic nanodevice with a biomolecular motor. Science. 290, 1555–1558;
- Schamel D., Mark A.G., Gibbs J.G., Miksch C., Morozov K.I., Leshansky A.M., Fischer P. (2014). Nanopropellers and their actuation in complex viscoelastic media. ACS Nano. 8, 8794–8801;
- Amir Y., Ben-Ishay E., Levner D., Ittah S., Abu-Horowitz A., Bachelet I. (2014). Universal computing by DNA origami robots in a living animal. Nat. Nanotechnol. 9, 353–357;
- ДНК-оригами: путь от гравюры до нанороботов длиной в 30 лет;
- Голактеко опасносте: ДНК-роботы в живом организме;
- Биоинженеры научились получать ДНК-структуры, сборкой и разборкой которых можно управлять;
- Qiu T., Lee T.C., Mark A.G., Morozov K.I., Münster R., Mierka O. et al. (2014). Swimming by reciprocal motion at low Reynolds number. Nat. Commun. 5, 5119;
- Wang J. and Zhang L. (2015). Artificial micromotors in the mouse’s stomach: a step toward in vivo use of synthetic motors. ACS Nano. 8, 117–123;
- Cheang U.K., Meshkati F., Kim H., Lee K., Fu H.C., Kim M.J. (2016). Versatile microrobotics using simple modular subunits. Sci. Rep. 6, 30472;
- Человек на чипе.
Комментарии