Куда ведут технологии при двигательных нарушениях
03 июля 2026
Куда ведут технологии при двигательных нарушениях
- 308
- 0
- 1
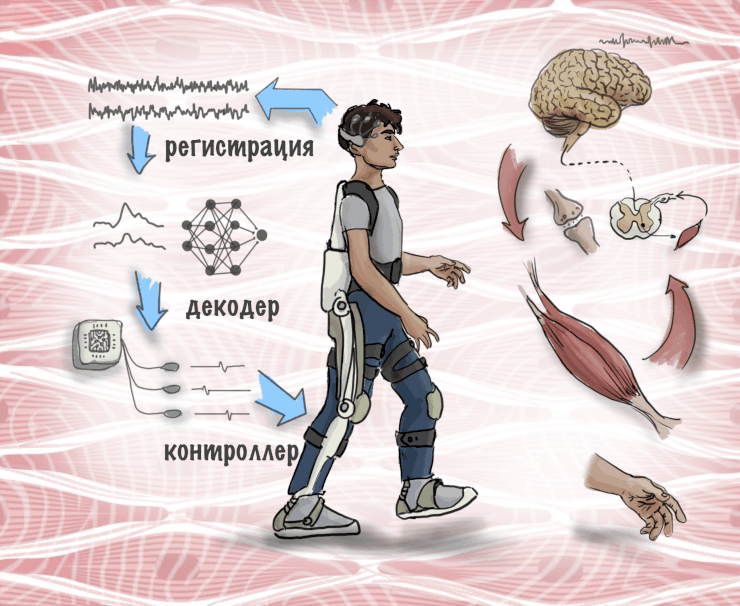
Концепт BCI–экзоскелетной системы: мозг, декодер и экзоскелет. Такие системы показывают возможное будущее нейроуправляемой реабилитации: активность моторной коры регистрируется нейроинтерфейсом, затем декодер преобразует ее в команды для контроллера экзоскелета. Сегодня это исключительно исследовательская модель и направление развития, но она предлагает пофантазировать о направлении, в котором могут развиваться технологии восстановления движения.
Рисунок в полном размере.
иллюстрация Елены Беловой
-
Автор
-
Редакторы
-
Рецензенты
-
Иллюстратор
Темы
Вообразите мир, в котором ваше движение ограничено. Для миллионов людей это не метафора: по оценке ВОЗ, около 80 млн человек в мире могут нуждаться в инвалидной коляске. Но ограничение движения может возникать по разным причинам: из-за мышцы, нерва, спинного мозга, коры, мозжечка, базальных ганглиев — или из-за утраченной конечности. Главный вопрос: можно ли это исправить? Как сегодня диагностируют двигательные расстройства? Какую роль в восстановлении движения играют современные технологии? Если хотите погрузиться в эти вопросы — новая статья спецпроекта «Медицинские нейротехнологии» специально для вас!

Медицинские нейротехнологии
В этом спецпроекте мы расскажем об инструментальной диагностике и лечении неврологических заболеваний, объединяя фундаментальную науку, клиническую практику и передовые тенденции в неврологии. Спецпроект дополняет цикл статей по нейрофармакологии, переходя от молекулярных основ заболеваний нервной системы к реалиям современной медицины и практическим подходам к диагностике и лечению.
Партнеры спецпроекта — Фонд развития отечественной науки, техники и медицины (ФРОНТМЕД), Российский центр неврологии и нейронаук
Чтобы разобраться в связанных с движением нейротехнологиях, нужно начать с базы — нейрофизиологии движения. Нейрофизиология изучает работу нервной системы, в том числе как именно мозг, спинной мозг, нервы и мышцы вместе создают, регулируют и корректируют движение. Нейротехнологии (которым и посвящен этот спецпроект [1]), в свою очередь, используют эти знания для диагностики, восстановления или усиления функций нервной системы — например, через нейроинтерфейсы или стимуляцию. А уже устройства, такие как протезы, экзоскелеты или системы мониторинга, в свою очередь, помогают движению случиться или корректируют его.
Движение — это не одна команда «от мозга к мышце», а результат работы сложной распределенной системы. Одни ее элементы передают сигнал к мышцам, другие планируют действие, поддерживают позу, контролируют равновесие, корректируют ошибки и помогают выбрать нужную двигательную программу, подходящую к ситуации. Поэтому любое движение — это не линейная цепочка, а согласованная работа нескольких уровней нервной системы.
Движение в четырех актах
Акт I. Команда к мышце
Первое, с чего мы начнем рассмотрение — что необходимо для того, чтобы мышцы начали сокращаться. Непосредственная команда к скелетной мышце передается через мотонейроны, которые бывают нескольких типов. На самом нижнем уровне находятся альфа-мотонейроны: они передают мышцам сигнал к сокращению через нервно-мышечный синапс.
- Альфа-мотонейроны —
- нервные клетки, которые располагаются в передних рогах спинного мозга и в двигательных ядрах черепных нервов в стволе мозга. Один альфа-мотонейрон посылает аксон к мышце, внутри нее разветвляется на терминали аксона и контактирует сразу с несколькими мышечными волокнами. Такой комплекс — один мотонейрон и все мышечные волокна, которые он иннервирует — называется двигательной единицей (рис. 1).

Рисунок 1. Двигательная единица. (а) Нижний мотонейрон в спинном мозге и путь аксона к мышце, которой он управляет. (б) Каждый α-мотонейрон образует контакты сразу с несколькими мышечными волокнами. На поперечном срезе мышцы видно, что волокна, управляемые одним α-мотонейроном, распределены по мышце довольно рассеянно, а не собраны в один плотный участок.
Neuroscience 6th Edition (с модификациями)
После того как сигнал получен, главную механическую работу выполняют экстрафузальные мышечные волокна (рис. 2А). Это обычные сократительные волокна скелетной мышцы: они укорачиваются, тянут сухожилия, двигают суставы и создают силу. Сила сокращения регулируется двумя способами: нервная система может подключать больше двигательных единиц и менять частоту импульсов α-мотонейронов. Чем больше единиц включено и чем чаще приходят импульсы, тем сильнее сокращение.
Но как понять, достаточно ли мышца напряглась или растянулась? В мышце есть собственная система датчиков растяжения! Внутри мышечных веретен находятся интрафузальные мышечные волокна (рис. 2Б). По изменению их натяжения чувствительные окончания веретена передают в спинной мозг информацию о длине мышцы и скорости ее изменения.
Интрафузальные волокна, в свою очередь, связаны с γ-мотонейронами, которые посылают сигналы к сократительным участкам интрафузальных волокон мышечного веретена (рис. 2). Их активация поддерживает натяжение веретена во время сокращения мышцы, благодаря чему веретено продолжает отслеживать длину мышцы и скорость ее изменения. Это важно, потому что во время сокращения мышца укорачивается, и веретено могло бы «провиснуть», перестав нормально сообщать о длине мышцы. Чтобы этого не произошло, нервная система часто активирует α- и γ-мотонейроны вместе: α-мотонейроны сокращают экстрафузальные волокна, а γ-мотонейроны поддерживают натяжение интрафузальных волокон. Благодаря этому мозг и спинной мозг продолжают получать информацию о положении мышцы даже во время движения.

Рисунок 2. Строение мышечного веретена и его иннервация. (а) Мышечное веретено находится внутри мышцы и регистрирует ее растяжение: чувствительные окончания передают эту информацию в спинной мозг. (б) Разные интрафузальные волокна и афференты кодируют скорость и степень растяжения, а γ-мотонейроны настраивают чувствительность веретена во время движения и поддержания позы.
Neuroscience 6th Edition (с модификациями)
То есть экстрафузальные волокна — это рабочая часть мышцы, интрафузальные — чувствительная измерительная часть, а мышечное веретено — это сенсорный рецептор, расположенный параллельно экстрафузальным мышечным волокнам и состоящий из интрафузальных мышечных волокон, чувствительных афферентных окончаний и γ-моторной иннервации (рис. 3). Оно передает в спинной мозг информацию о растяжении мышцы и участвует в регуляции мышечного тонуса, позы и рефлекса растяжения.

Рисунок 3. Мышечное веретено и его связь с нервной системой. Мышечное веретено — это внутренний «датчик растяжения» мышцы. Его чувствительные волокна Ia и II передают в нервную систему информацию о том, насколько мышца растянута и как быстро меняется ее длина. γ-мотонейроны настраивают чувствительность самого веретена, а α-мотонейроны управляют основными мышечными волокнами, которые создают сокращение. Благодаря такой системе мозг и спинной мозг постоянно получают обратную связь о положении и движении мышцы.
Neuroscience 6th Edition (с модификациями)
Контакт между α-мотонейроном и экстрафузальным мышечным волокном называется нервно-мышечным синапсом. В нем электрический импульс мотонейрона не передается мышце напрямую, а сначала он вызывает выделение химического посредника — ацетилхолина (читайте: «Молекула здравого ума» [2]). Он связывается с рецепторами на мембране мышечного волокна, вызывает его возбуждение, запускает выход кальция внутри клетки, и после этого белки актин и миозин начинают взаимодействовать: в результате мышечное волокно сокращается.
Мы рассмотрели, как движение превращается из нервного сигнала в механическое сокращение мышцы. Сбой в любом звене этой цепи — в мотонейронах, периферических нервах или нервно-мышечном синапсе — может привести к тому, что мышцы перестают получать правильные команды. Человек может терять силу, точность движений или способность двигаться вовсе. Так происходит, например, при боковом амиотрофическом склерозе, миастении и некоторых заболеваниях периферических нервов. Многие технологии двигательной реабилитации как раз пытаются обойти или компенсировать такие нарушения.
- Боковой амиотрофический склероз —
- заболевание, при котором постепенно разрушаются двигательные нейроны. Из-за этого мышцы получают все меньше сигналов: сначала слабеют, затем уменьшаются в объеме, хуже контролируются, а со временем могут перестать работать. Читайте также о «Генной терапии нейромоторных болезней» [3].
- Миастения —
- заболевание нервно-мышечного синапса. При миастении сам нерв может посылать сигнал, но мышца плохо его «слышит». Поэтому сила быстро заканчивается: человек сначала может двигаться нормально, но при повторении действия появляется выраженная слабость и утомляемость.
Акт II. Обратная связь: как тело отвечает мозгу
Нервной системе обязательно получать информацию от тела и внешней среды во время движения — обратную связь. Наличие этой информации позволяет мозгу непрерывно контролировать выполнение действия, сравнивая запланированный результат с реальным. Благодаря обратной связи движение остается точным и устойчивым: нервная система может вовремя обнаруживать ошибки и корректировать работу двигательной системы. Чтобы рука, нога или корпус двигались точно (неважно, рефлекторно или произвольно), нервная система должна постоянно получать сенсорную информацию о том, что уже происходит с телом.
Реальная обратная связь от тела приходит с задержкой: сначала движение должно произойти, затем рецепторы фиксируют изменение, сигнал доходит до ЦНС и обрабатывается. Поэтому нервная система использует эфферентную копию двигательной команды, чтобы заранее предсказать результат движения, а затем сравнить прогноз с реальными сигналами от проприоцепции, зрения и вестибулярной системы.
- Афференты —
- это «входящие» пути: они несут сенсорную информацию от тела к нервной системе.
- Эфференты —
- «нисходящие» пути: они передают команды от нервной системы к мышцам. В мышечном веретене афференты Ia и II сообщают о растяжении мышцы, а γ-мотонейроны помогают поддерживать чувствительность самого веретена.
- Проприоцепция (мышечное чувство) —
- способность организма воспринимать положение и движение частей тела в пространстве, а также силу и напряжение мышц. Позволяет осознавать, где находятся руки, ноги, голова и другие части тела, даже когда человек не смотрит на них, и контролировать движения.
Проприоцепция сообщает нервной системе о положении и движении тела, что основано на информации от рецепторов в мышцах, сухожилиях, суставах и коже. Особенно важны мышечные веретена и сухожильные органы Гольджи. Сухожильные органы Гольджи (рис. 4) реагируют прежде всего на силу натяжения мышцы через афференты Ib. Поэтому мышечные веретена можно описать как датчики длины, а органы Гольджи — как датчики усилия.

Рисунок 4. Сухожильный орган Гольджи и его роль в регуляции мышечного напряжения. (а) Сухожильный орган Гольджи расположен в месте перехода мышцы в сухожилие и соединен с коллагеновыми фибриллами. При повышении напряжения мышцы он активирует Ib-афферентные волокна. (б) Ib-афференты передают сигнал в спинной мозг, где через тормозные интернейроны снижают активность мотонейронов той же мышцы. Этот механизм отрицательной обратной связи ограничивает чрезмерное мышечное напряжение и помогает поддерживать более стабильный уровень силы сокращения.
Neuroscience 6th Edition (с модификациями)
Проприоцептивная обратная связь участвует и в быстрых спинальных рефлексах — автоматических ответах, которые замыкаются на уровне спинного мозга и не требуют предварительной «команды» от коры. Они помогают мышцам быстро реагировать на растяжение, сохранять тонус, стабилизировать суставы и поддерживать позу. Классический пример — рефлекс растяжения (рис. 5): когда мышца внезапно растягивается, мышечные веретена регистрируют это изменение и передают сигнал в спинной мозг; оттуда почти сразу приходит ответ к той же мышце, заставляя ее сократиться. Так организм компенсирует неожиданное растяжение — например, когда человек спотыкается или удерживает равновесие.

Рисунок 5. Рефлекс растяжения и спинальная регуляция сокращения мышцы. Если мышца внезапно растягивается, мышечное веретено активирует Ia-афференты, они возбуждают ɑ-мотонейроны той же мышцы, и экстрафузальные волокна развивают напряжение, противодействующее дальнейшему растяжению. Одновременно через вставочные нейроны могут тормозиться мышцы-антагонисты. Это помогает стабилизировать позу и положение суставов еще до осознанной коррекции.
Neuroscience 6th Edition (с модификациями)
Если контур сенсорной обратной связи нарушается, страдает не только чувствительность, но и само управление движением. Например, после инсульта человек может частично сохранять мышечную силу, но хуже управлять рукой, если плохо чувствует ее положение, прикосновение или движение. В систематическом обзоре нарушения соматосенсорной информации от руки были связаны с худшим моторным и функциональным восстановлением верхней конечности: без нормальной телесной обратной связи рука становится менее «управляемой», даже если команда к движению не исчезла полностью [4].
Когда один канал обратной связи становится ненадежным, нервная система пытается опереться на другие. Зрение в этой системе помогает направлять движение к цели, оценивать расстояние и корректировать траекторию. Оно может частично подстраховывать проприоцепцию: например, человек начинает внимательнее смотреть на поверхность, по которой идет. Но зрительная компенсация не универсальна: в темноте или при закрытых глазах она исчезает, а при быстрых движениях оказывается слишком медленной, чтобы полностью заменить телесную обратную связь.
Именно поэтому реабилитация пациентов с нарушениями движений часто направлена не только на мышцы, но и на восстановление сенсорной интеграции. Например, вестибулярная реабилитация после инсульта использует движения глаз и головы, упражнения на устойчивость взгляда и равновесие, чтобы заново настроить согласование вестибулярной, зрительной и телесной информации. В метаанализе 2023 года такая реабилитация улучшала некоторые клинические показатели ходьбы (например, тест «встать–пройти–развернуться–сесть» (Timed Up-and-Go test), показатель функциональной мобильности и риска падений) [5], особенно в первые месяцы после инсульта. Однако эффект был частичным: убедительных улучшений не получили для числа падений, скорости ходьбы в 10-метровом тесте и некоторых параметров шага. Поэтому такие методы не стоит рассматривать как самостоятельный метод двигательной реабилитации, и они могут быть наиболее эффективными в сочетании с другими реабилитационными технологиями.
Вестибулярная система отвечает за другой аспект движения — устойчивость тела и стабильность взгляда. Она сообщает нервной системе, как движется голова и как тело сориентировано в гравитационном поле. Один из наглядных примеров ее работы — вестибуло-окулярный рефлекс (рис. 6): при повороте головы глаза автоматически смещаются в противоположную сторону, чтобы изображение не «прыгало», а оставалось стабильным. Если этот рефлекс нарушен, человеку трудно сохранять четкость получаемого изображения.

Рисунок 6. Вестибуло-окулярный рефлекс. Когда голова поворачивается, вестибулярная система фиксирует это движение и перераспределяет активность глазодвигательных мышц: одни мышцы тормозятся, другие активируются. Благодаря этому глаза автоматически смещаются в противоположную сторону, и изображение на сетчатке остается стабильным. Поскольку небольшие движения головы происходят постоянно, этот рефлекс необходим для стабильного зрения — людям с нарушением этого рефлекса трудно читать печатный текст: глаза не компенсируют мелкие движения головы.
Wikipedia (c модификациями)
Спинальные рефлексы, проприоцепция, зрение и вестибулярная система образуют систему постоянной коррекции движения. Спинальные рефлексы обеспечивают быстрые автоматические ответы на растяжение или раздражение, проприоцепция сообщает о состоянии мышц и суставов, зрение — о внешней цели и положении тела в пространстве, вестибулярная система — о равновесии и движении головы. За любым, даже небольшим движением, стоит большая и слаженная работа всех систем.
Акт III. Ритм, маршруты и коррекция движения
Для некоторых движений нервной системе не нужно каждый раз заново рассчитывать каждое сокращение мышцы, что значительно упрощает работу мозга — это касается ритмичных движений, которые повторяются последовательно. Потому что существует ритм! Например, при ходьбе ноги должны по очереди сгибаться и разгибаться, и это не рассчитывается мозгом заново для каждого шага. В спинном мозге есть специальные сети нейронов — центральные генераторы ритма. Они работают как встроенный метроном: задают базовый рисунок повторяющихся или стереотипных движений: например, ритм дыхания, жевания или шагов при ходьбе. Такие программы могут работать без постоянного сознательного контроля, но все равно настраиваются сигналами сверху и обратной связью от тела. Поэтому шаг меняется под поверхность, дыхание — под нагрузку, а защитные реакции вроде кашля или чихания запускаются как готовые автоматические сценарии.
Звучит как классная эволюционная оптимизация! Но для того, чтобы она была возможна, нервной системе нужны проводящие пути, которые бывают нисходящими и восходящими.
Нисходящие пути
передают команды сверху вниз — от коры и ствола мозга к спинному мозгу. Кора особенно важна для произвольных и точных движений. Но и в коре тоже нет одного-единственного «центра движения» (рис. 7).
Современные исследования показывают, что произвольные движения обеспечиваются распределенной сетью областей мозга. В нее входят моторная и премоторная кора, теменные области, а также подкорковые структуры — базальные ганглии, таламус и мозжечок [6].
Первичная моторная кора больше всего связана с отправкой двигательных команд вниз, к спинному мозгу, особенно для точных движений кисти и пальцев. Премоторная кора помогает выбрать движение под задачу и контекст: например, куда тянуться, как сориентировать руку, как связать действие с внешней целью. Дополнительная моторная область участвует в подготовке и организации действий, особенно когда движение запускается не внешним стимулом, а внутренним намерением или входит в последовательность (например, в танце). Таким образом, движение рождается в сети моторных, премоторных, сенсорных и подкорковых контуров, а не в одной конкретной области.

Рисунок 7. Моторные области коры: первичная моторная кора, премоторная кора, дополнительная моторная область. Их расположение подчеркивает главный принцип: произвольное движение обеспечивается не одной зоной, а согласованной работой нескольких моторных областей коры.
Get Body Smart (c модификациями)
Восходящие пути
работают как каналы обратной связи, которой мы уже касались в предыдущем разделе: они передают информацию от тела к мозгу. Благодаря им мозг получает данные о реальном состоянии мышц, суставов и позы и может понимать, совпадает ли выполняемое движение с исходным планом. Особенно важна эта информация для мозжечка — структуры, которая помогает уточнять движение и исправлять ошибки.
Мозжечок сопоставляет ожидаемый результат действия с тем, что получилось на самом деле. Если движение отклоняется от плана, он помогает скорректировать силу, направление и координацию сокращений. Часть таких поправок вносится прямо во время движения, а часть закрепляется через обучение, чтобы в следующий раз действие получилось точнее. Поэтому при повреждении мозжечка движение обычно не исчезает, но становится плохо скоординированным: человеку труднее точно попасть в цель, сохранить устойчивость и поддерживать плавную походку.
Базальные ганглии (рис. 8) помогают выбирать и запускать нужные двигательные программы, подавляя конкурирующие движения. Это особенно важно для последовательных и хорошо выученных действий — например, танца, игры на музыкальном инструменте или ходьбы по знакомому маршруту. В таких случаях они помогают не столько выполнить отдельное сокращение мышцы, сколько вовремя переключаться между элементами движения и превращать цепочку действий в плавную автоматизированную программу. Поэтому при нарушении работы базальных ганглиев возникают проблемы с началом движения, плавностью переключения и автоматизацией двигательных программ, как это происходит при паркинсонизме.

Рисунок 8. Важная роль базальных ганглиев — переключение между целенаправленным действием и привычкой. Завязать шнурки или закрыть дверь — такие действия часто выполняются почти автоматически. Pазные петли коры и базальных ганглиев участвуют в целенаправленном контроле и в привычных действиях. Поэтому нарушение работы базальных ганглиев может проявляться не только двигательными симптомами, но и трудностями выбора, переключения и контроля поведения. Подробнее о стволе, базальных ганглиях и мозжечке (а также о рефлекторных дугах) — в тексте «Биомолекулы» «Ликбез по ЦНС» [7].
American Baby & Child (c модификациями)
Акт IV. Когда система дает сбой
Описанные выше схемы при корректной работе обеспечивают быстрые, точные движения, происходящие для человека как бы «сами собой»: если все в порядке, мы редко задумываемся о том, как поставить ногу в следующий шаг или взять с пола предмет. Но иногда выстроенные процессы ломаются. Характер двигательных нарушений зависит от того, на каком уровне повреждена двигательная система: рассмотрим разные нарушения и их причины.
Принято различать центральные поражения, затрагивающие головной мозг, спинной мозг и нисходящие двигательные пути; и периферические поражения, связанные с повреждением периферических нервов, нервно-мышечных синапсов или самих мышц. От того, на каком уровне возникло повреждение, зависят симптомы, методы диагностики и подходы к реабилитации.
Если ломается периферическое звено —
нижний мотонейрон, его аксон, периферический нерв, нервно-мышечный синапс или сама мышца — возникает вялый парез. Парез — снижение силы мышцы. Полная потеря мышечной силы, и, как следствие, отсутствие движений в конечности, называется плегией, или параличом (рис. 9). Парез развивается потому, что, как мы уже говорили, нижний мотонейрон является прямым выходом к мышце. Если он или его аксон повреждены, часть мышечных волокон перестает получать команду, поэтому мышца не только слабеет, но и теряет нормальное фоновое напряжение.

Рисунок 9. Типы паралича описывают не диагноз, а «карту» нарушений движения. По тому, какие части тела затронуты, можно предположить уровень поражения нервной системы, но одна и та же схема паралича может возникать при разных причинах — например после инсульта, травмы спинного мозга, воспаления, опухоли или врожденных нарушений развития. Поэтому такие термины помогают описать распределение симптомов, но сами по себе не объясняют, почему они возникли.
LezDo TechMed (с модификациями)
Для периферического поражения также характерна арефлексия — исчезновение рефлексов. Например, при проверке сухожильного рефлекса ответное сокращение может быть слабым или полностью отсутствовать. Это связано с тем, что рефлекс требует целой рефлекторной дуги: сенсорный рецептор должен передать сигнал в спинной мозг, затем этот сигнал должен активировать мотонейрон, а мотонейрон — вызвать сокращение мышцы. Если что-то из этого повреждено, то дуга разрывается, и рефлекс выпадает. При таком повреждении часть двигательных единиц становится недоступной или плохо работает, поэтому даже при попытке сильного движения мышца не может развить нормальную силу.
Если нарушается корковый уровень
После инсульта часто страдают движения руки и кисти — особенно если повреждение затрагивает моторные области коры или нисходящие пути. Поэтому многие исследования восстановления после инсульта фокусируются именно на верхней конечности: ее функция важна для самостоятельности человека и хорошо отражает состояние тонкого моторного контроля. После инсульта в восстановлении руки участвуют оба полушария. Неповрежденная часть моторной коры при этом может помогать при тяжелом поражении, частично беря на себя компенсаторную работу. Но при более легких нарушениях ее чрезмерная активность не всегда полезна: она может поддерживать дисбаланс между полушариями и замедлять перестройку поврежденной части коры, которая важна для восстановления тонких движений. Поэтому восстановление после инсульта — это не просто возвращение команды к мышце, а перенастройка всей моторной сети [8]. На практике это пытаются делать с помощью реабилитации: повторяющихся целевых движений, нейромодуляции и BCI-подходов. Подробнее к этому мы вернемся в разделе о нейрореабилитации.
Нарушения организации действия (например, апраксию) чаще связывают не с одной моторной зоной, а с более широкой лево-полушарной сетью действия, включающей теменные, лобные и височно-затылочные области. При апраксии человек понимает задачу и не обязательно парализован, но не может правильно выполнить знакомое действие — например показать жест, имитировать движение или воспользоваться предметом. Метаанализ исследований апраксии [9] связывает такие нарушения прежде всего с левой сетью действия, особенно с нижней теменной корой, но также с лобными и височно-затылочными областями.
Если нарушается нисходящий контроль
Иная картина возникает, когда повреждаются нисходящие двигательные пути. Особенно важен кортикоспинальный тракт — его также называют пирамидным путем. Здесь проблема кроется в нарушении контроля со стороны головного мозга — это уже центральное поражение. В норме кора и стволовые центры не только запускают движения, но и регулируют спинальные рефлексы, в том числе тормозят их, когда это необходимо. Если этот контроль нарушается, спинальные рефлекторные цепи могут становиться чрезмерно возбудимыми. Поэтому появляются спастичность (рис. 10) и гиперрефлексия.

Рисунок 10. Пример спастики мышц кисти и пальцев рук. Спастичность — это патологически повышенное сопротивление мышцы пассивному растяжению, особенно если движение происходит быстро. То есть мышца как будто «упирается» и не дает легко согнуть или разогнуть конечность. Важный признак спастичности — зависимость от скорости: при медленном движении сопротивление может быть меньше, а при быстром растяжении резко усиливается.
Гиперрефлексия означает чрезмерно усиленные рефлексы: сухожильный рефлекс становится слишком резким, широким, иногда может сопровождаться повторными сокращениями. Если при периферическом поражении рефлекс «ломается», то при центральном поражении он часто, наоборот, растормаживается.
Если страдает мозжечок
При поражении мозжечка возникает другой тип нарушения — атаксия. Здесь мышца не обязательно слаба, и рефлексы не обязательно исчезают. Главная проблема в координации. Рука может идти к цели по «ломаной» траектории: человек тянется к предмету, но промахивается или делает лишние корректирующие движения. Может нарушаться походка: она становится шаткой, неустойчивой, часто с широко расставленными ногами. Это связано с тем, что мозжечок уже не может сравнивать запланированное движение с тем, что реально получилось, и корректировать ошибку.
Если нарушается уровень базальных ганглиев
Наконец, есть нарушения, связанные не с прямым путем от коры к спинному мозгу, а с системами, которые помогают выбирать, запускать и переключать движения. Особенно важны здесь корково-базально-ганглионарные контуры: они связывают кору, базальные ганглии, таламус и снова кору. При нарушении их работы может возникать брадикинезия — замедленность движений, трудность начать действие, уменьшение амплитуды и выразительности движений. Другой вариант — гиперкинезы, то есть лишние непроизвольные движения: тики, хорея (видео 1), дистонические движения и другие моторные «вставки», которые человек не планировал.
Непроизвольные движения могут выглядеть похоже для неспециалиста, но иметь разную природу: тремор обычно ритмичен, дистония связана с устойчивым спазмом или неправильной позой, а тики чаще выглядят как короткие повторяющиеся движения или звуки. Например, моторные и вокальные тики могут проявляться резкими движениями головы, лица, рук и непроизвольными звуковыми реакциями (видео 2).
Видео 1. Хореические движения. Хорея проявляется как быстрые, неритмичные и непредсказуемые непроизвольные движения.
Видео 2. Моторные и вокальные тики. В отличие от слабости мышцы или потери конечности, здесь проблема проявляется как повторяющиеся непроизвольные движения и звуки. Такой пример показывает, что нарушение движения может быть связано не с отсутствием команды к мышце, а с патологическим появлением лишних двигательных и голосовых актов.
Получается, что разные уровни поражения дают разные двигательные «почерки»: периферическое звено — вялую слабость и выпадение рефлексов, корковый уровень — ухудшение произвольных и запланированных действий, нисходящие пути — спастичность и гиперрефлексию, мозжечок — атаксию, а базальные ганглии — замедление движений или лишние непроизвольные движения.
Как оценивают движения и их нарушения
Методы оценки движений и их нарушений нужны не только для того, чтобы понять, насколько сильно нарушено движение, но и для того, чтобы определить, на каком уровне двигательной системы возник сбой. Клинические рекомендации, основанные на доказательной медицине, разрабатывают международные и национальные организации: World Health Organization (WHO), британский National Institute for Health and Care Excellence (NICE), шотландская Scottish Intercollegiate Guidelines Network (SIGN) и американское Agency for Healthcare Research and Quality (AHRQ). Рекомендации опираются не просто на экспертное мнение, а на систематический анализ исследований и прозрачные правила оценки доказательств; например, используется подход GRADE для оценки надежности данных и силы рекомендаций. В России используют клинические рекомендации Минздрава.
Клинические методы оценки
Из рекомендаций NICE ясно, что оценка неврологических симптомов строится не вокруг одного универсального теста, а вокруг клинического паттерна: что именно нарушено, как быстро это появилось и с чем сочетается. Врач оценивает силу, чувствительность, рефлексы, координацию, речь, почерк, позу, ходьбу, наличие тремора и других непроизвольных движений. Например, внезапная слабость даже одной кисти может быть признаком инсульта, а постепенно нарастающая слабость — поводом думать о нервно-мышечном заболевании.
Диагностически важны и более «бытовые» признаки. Например, маленький и постепенно уменьшающийся почерк может указывать на паркинсонизм, а трудность, возникающая именно при письме — на писчий спазм, одну из форм фокальной дистонии (видео 3).
Видео 3. Писчий спазм как пример фокальной дистонии. При этом состоянии рука может сохранять силу и выполнять другие действия, но во время письма возникают непроизвольные сокращения мышц, спазм, неправильная поза кисти или пальцев, и привычное движение распадается.
Важно, что проблема письма не всегда связана с движением: иногда человек плохо пишет не из-за руки, а из-за трудности подбирать, удерживать или организовывать слова, то есть из-за языкового нарушения.
Помимо видимого паттерна движения, важны признаки неврологического осмотра. Рефлексы помогают отличать центральный и периферический уровень поражения: усиленные сухожильные рефлексы скорее заставляют думать о поражении мозга или спинного мозга, сниженные — о периферической нейропатии. Важны и сочетания симптомов: слабость вместе с онемением и нарушением равновесия требует другой оценки, чем изолированное онемение или одиночные мышечные подергивания.
Клинические признаки болезни Паркинсона
Отдельный пример клинического паттерна — болезнь Паркинсона. NICE рекомендует подозревать болезнь Паркинсона при сочетании тремора, скованности, замедленности движений, нарушений равновесия и походки. Один тремор еще не равен паркинсонизму, но если он сочетается с медленностью, ригидностью и изменением походки, это уже диагностически значимый паттерн. Диагноз при этом остается прежде всего клиническим — он ставится по анамнезу и неврологическому осмотру. Инструментальные методы используют не как «главный тест на болезнь Паркинсона», а когда нужно отличить его от похожих состояний: например, NICE не рекомендует структурную МРТ для диагностики самой болезни Паркинсона, но допускает ее для дифференциальной диагностики других паркинсонических синдромов (например, атипичный паркинсонизм) [10].
Еще один практический пример — оценка риска падений. Для оценки риска падений NICE рекомендует не полагаться только на формальные «калькуляторы риска», а выяснять, были ли падения за последний год, и при необходимости оценивать походку и баланс. Если человек уже падал, и у него есть нарушение походки или равновесия, пациенту назначают программу профилактических упражнений, а также оценивают домашние факторы риска. При более высоком риске проводится комплексная оценка: учитывают силу мышц, мобильность, походку, равновесие, зрение, слух, лекарства, когнитивное состояние, головокружение, сопутствующие заболевания и неврологический статус.
Клиническая оценка движения нужна не только для описания того, как именно нарушено движение. Она помогает понять, на каком уровне двигательная система перестала работать согласованно: это необходимо для правильной диагностики, и соответственно, корректного лечения или реабилитации. В зависимости от того, что послужило причиной — от передачи команды к мышцам до контроля положения тела и выбора нужного действия — тактика лечения может сильно измениться.
Инструментальные методы оценки
Помимо клинического осмотра, двигательные нарушения оценивают инструментально: это также помогает понять, где именно возник сбой. Один из ключевых методов — электронейромиография (ЭНМГ), которая исследует работу периферических нервов, мышц и нервно-мышечной передачи. Это нейрофизиологическая диагностика, которая дополняет клинический осмотр: уточняет уровень, выраженность и давность поражения, помогает отслеживать восстановление, оценивать ответ на лечение [11].
В электродиагностическую оценку входят разные методы. Исследование проводимости нервов показывает, с какой скоростью и амплитудой сигнал проходит по нерву, что помогает отличать, например, демиелинизацию от аксонального повреждения. Игольчатая ЭМГ регистрирует электрическую активность мышцы в покое и при произвольном сокращении. Отдельные тесты оценивают нервно-мышечную передачу, например при подозрении на миастению. Важно, что ЭНМГ — не шаблонный тест, а исследование, которое врач выстраивает под конкретную клиническую задачу и может менять по ходу обследования.
Другие инструментальные методы помогают оценивать центральные и системные причины нарушений движения. МРТ и КТ выявляют структурные изменения: инсульт, опухоль, поражение спинного мозга или другие изменения центральной нервной системы. При паркинсонизме могут применяться специальные методы визуализации дофаминергической системы — например SPECT, если нужно отличить паркинсонизм от эссенциального тремора.
Подробнее прочитать про МРТ и КТ можно во второй статье спецпроекта «Медицинские нейротехнологии»: «Мозг под наблюдением: путеводитель по методам нейровизуализации» [12].
Отдельное место оценки двигательных нарушений занимает стабилометрия (рис. 11) или компьютеризированная постурография. Это не новый метод, но он близок к современным цифровым подходам, потому что переводит нарушение равновесия в количественные показатели: амплитуду и скорость колебаний, площадь отклонений, асимметрию опоры и зависимость баланса от зрительной, проприоцептивной и вестибулярной информации.

Рисунок 11. Стабилометрия полезна при нарушениях ходьбы, риске падений, паркинсонизме, мозжечковых и вестибулярных нарушениях, но редко указывает на диагноз сама по себе: ее результаты нужно интерпретировать вместе с осмотром, анамнезом и другими исследованиями.
Особое место в картине симптомов занимает замирание ходьбы (freezing of gait) — состояние, когда человек хочет идти, но несколько секунд не может начать или продолжить шаг. Это не просто замедление: движение буквально блокируется. Замирание ходьбы связано с падениями и ухудшением качества жизни, поэтому одна из задач технологий — не только распознать такой эпизод, но и вовремя помочь человеку снова начать движение. Для этого используют подсказки: зрительные, звуковые или вибротактильные сигналы, которые задают внешний ритм и помогают «перезапустить» шаг вовремя [13].
Клиническая и инструментальная оценка позволяют понять, где примерно возник сбой. Но такие методы чаще дают короткий снимок состояния, а не непрерывную картину движения. Этого может не хватать, когда симптомы меняются в течение дня, зависят от лекарств и усталости, возникают только в быту или проявляются редкими эпизодами — например падениями, замиранием ходьбы или внезапным ухудшением координации.
Поэтому развивающиеся цифровые методы стоит рассматривать как расширение клинической и инструментальной оценки, потому что они помогают измерять движение количественно, длительно и в более естественных условиях — там, где обычный осмотр и разовое исследование показывают только часть картины.
Новые подходы к диагностике расстройств движения
Данные систематических обзоров [13], [14], [15] показывают, что носимые сенсоры и видеоанализ [16], [17] позволяют получать цифровые биомаркеры движения и регистрировать объективные показатели двигательных нарушений в реальных условиях. Кроме того, развиваются и другие подходы: бесконтактный радиоволновой мониторинг, мультимодальные цифровые биомаркеры [18]. Однако клиническое применение перечисленных методов пока ограничено гетерогенностью протоколов. Кроме того, стандартизация протоколов анализа движений руки осложняется большим количеством разнообразных парадигм.
Почему обычной оценки в кабинете недостаточно
В качестве примера возьмем болезнь Паркинсона, которую обычно оценивают в кабинете врача. Пациента просят пройти несколько метров, повернуться, выполнить короткие моторные задания, а специалист по шкале оценивает выраженность симптомов [14]. Такой подход важен, но у него есть очевидное ограничение: кабинет врача — это не реальная жизнь. На приеме человек идет по ровному полу; знает, что за ним наблюдают; и выполняет короткое задание в контролируемой обстановке. А дома и на улице все иначе: нужно вставать, поворачиваться, идти по неровной поверхности, нести сумку, разговаривать.
Поэтому в последние годы все больше исследователей пытаются перенести оценку движения из лаборатории в повседневную среду. Для этого используют носимые датчики, смартфоны, системы машинного обучения, а иногда — виртуальную реальность и роботизированные или компьютерные решения для реабилитации [13], [15]. Общая идея у этих подходов одна: болезнь Паркинсона нужно видеть как длительный процесс, разворачивающийся в обычной жизни пациента. Максимально ранняя диагностика позволит вовремя начать терапию и затормозить развитие болезни, сохраняя качество жизни пациента.
Движение как набор измеримых параметров
В современной клинической диагностике уже используют цифровые показатели мобильности (digital mobility outcomes, DMO). Это измеряемые параметры движения: скорость ходьбы, длина шага, время шага, устойчивость ритма, асимметрия движений, вариабельность ходьбы. Такие показатели позволяют количественно описать то, что раньше часто формулировали общими словами: «ходит медленно», «шаркает», «теряет устойчивость», «хуже поворачивается». В обзоре, авторы которого проанализировали 27 исследований [14], ходьбу людей с болезнью Паркинсона измеряли именно в реальных условиях. В большинстве работ оказалось, что в обычной жизни пациенты ходят хуже, чем в лаборатории: медленнее, с более короткими шагами и менее стабильным паттерном походки.
В таких исследованиях часто используют понятие периода ходьбы — отдельного отрезка времени, в течение которого человек действительно идет. При этом разные периоды дают разную информацию. Короткие фрагменты часто захватывают переходные моменты, когда человек только начинает движение, меняет направление или останавливается. Более длинные фрагменты лучше показывают уже установившуюся ходьбу. Поэтому результат зависит не только от самого датчика, но и от того, какие периоды движения исследователи решают включить в анализ [14].
Популярность в оценке движения набирает и домашний мониторинг с помощью инерциальных датчиков (inertial sensors). Так называются они потому, что измеряют движение через проявления инерции: если тело ускоряется, замедляется, поворачивается или меняет положение, устройство фиксирует эти изменения. Носимые инерциальные датчики можно закреплять на разных сегментах ноги — например на бедре, голени или стопе (рис. 12). Внутри такого сенсора обычно есть акселерометр и гироскоп: первый фиксирует ускорение, второй — вращение; иногда есть магнитометр, который помогает определить ориентацию в пространстве. Вместе они образуют инерциальный измерительный модуль (inertial measurement unit, IMU). Поэтому устройство «видит», как сегмент ноги движется в трех осях: вперед-назад, вверх-вниз и в стороны, а также как он поворачивается во время шага. Такой модуль можно закрепить не только на ногах, но и на пояснице, талии, запястье и отслеживать, как движется конкретная часть тела [15]. Это позволяет отслеживать как общую двигательную активность, так и отдельные характеристики ходьбы: длину и частоту шага, симметрию движений, устойчивость паттерна, скорость поворотов и работу конкретных сегментов тела.

Рисунок 12. Носимые сенсоры для анализа движения. В данном исследовании использовались инерциальные сенсоры, закрепленные на стопе, голени и бедре. Для оценки ориентации сегментов авторы применяли данные акселерометра и гироскопа, а для восстановления положения стопы — акселерометрические данные с последующей коррекцией дрейфа по фазе опоры.
Не только диагностика, но и эффективность лечения
С помощью инерциальных датчиков можно не просто «записать движение», а автоматически распознавать отдельные проявления болезни Паркинсона в повседневной жизни. Особенно важно различать состояния on и off при терапии леводопой: в on-период препарат действует, и движения лучше контролируются; а в off-периоде действие препарата ослабевает, и симптомы усиливаются. В обзоре [15] авторы проанализировали 24 исследования домашнего мониторинга у пациентов с болезнью Паркинсона с использованием инерциальных датчиков. Большая часть работ была посвящена нарушениям ходьбы, в т.ч. поворотам и падениям и физической активности, а другая часть — отдельным расстройствам движений (брадикинезия, дискинезии, тремор и др.). Для некоторых задач алгоритмы показывали высокую точность: например, в отдельных работах тремор и дискинезии распознавались с точностью выше 90%, а состояния on и off при терапии леводопой — примерно с точностью 92%. Это важно, потому что такие данные могут помочь врачу увидеть, когда препарат перестает действовать, насколько выражены непроизвольные движения и как меняется состояние пациента между визитами. Но эти результаты не были одинаковыми для всех симптомов и исследований: в других работах чувствительность к состояниям on/off и дискинезиям была заметно ниже, то есть система могла пропускать часть реальных эпизодов.
Когда алгоритм ищет скрытые признаки нарушения
Отдельная группа технологий связана с искусственным интеллектом [15]. Здесь движение превращается в поток данных, а алгоритм пытается распознать в нем патологический паттерн: нормальная это походка или паркинсоническая, приближается ли замирание (об этом чуть ниже), есть ли тремор, дискинезия или признаки ухудшения. В таких работах используют разные методы машинного обучения, включая сверточные нейронные сети и модели, которые анализируют временную динамику сигнала. Это важно, потому что многие нарушения при болезни Паркинсона не всегда заметны в коротком клиническом тесте, но могут проявляться в длительных данных.
- Сверточные нейронные сети (convolutional neural networks, CNN) —
- это тип искусственного интеллекта, который особенно хорошо работает с изображениями и видео. Их можно представить как систему «умных фильтров»: сначала сеть ищет простые признаки — края, линии, контуры, пятна света и тени; затем более сложные — формы частей тела, позу, положение конечностей; а потом уже целые паттерны движения. В видеоанализе двигательных нарушений CNN может, например, обрабатывать кадры ходьбы или движения рук и находить признаки, которые связаны с болезнью: замедленность, тремор или необычный ритм движения. Главное отличие от обычной программы в том, что CNN не получает заранее вручную прописанное правило вроде «если шаг короче X, значит нарушение»; она обучается на примерах и сама выделяет признаки, которые помогают отличить нормальное движение от патологического. См. также: «Глаза прогресса: как глубокое обучение помогает видеть невидимое для человека» [20].
Камера вместо лаборатории движения
Видеоанализ двигательных нарушений сегодня стал эталоном оптического анализа движений. В отличие от обычной видеозаписи в лабораториях видеоанализа используют целый комплекс оборудования: комплекс инфракрасных высокоточных камер для 3D-захвата движения, отражающие маркеры на теле, силовые платформы для оценки опоры и иногда дополнительные датчики, например ЭМГ. Такие системы дают очень точные данные, но требуют специального помещения, настройки оборудования и участия обученных специалистов.
При описываемом выше типе видеоанализа камера не крепится к пациенту: ее ставят на штатив или другое фиксированное основание, а человек просто выполняет движение, например, идет по коридору. Алгоритмы вроде OpenPose и DeepLabCut находят на видео ключевые точки тела — колени, стопы, кисти, пальцы — и строят «скелет» движения, по которому можно рассчитать необходимые параметры или заметить проявление симптомов нарушений. Подробнее об этих технологиях применительно к анализу движения животных в лаборатории и дикой природе читайте в статье «Глаза прогресса: как глубокое обучение помогает видеть невидимое для человека» [20].
Встречаются исследования, в которых используют недорогие инструменты: например, видеозаписи, снятые с обычного планшета планшета [16]. Алгоритм на основе OpenPose выделял ключевые точки тела и рассчитывал параметры ходьбы: время и длину шага, скорость ходьбы, асимметрию и некоторые суставные углы. Метод тестировали у людей без нарушений ходьбы, пациентов после инсульта и пациентов с болезнью Паркинсона. Результаты сравнивали с лабораторной системой 3D-захвата движения: это установка с несколькими камерами и маркерами на теле, которая очень точно отслеживает движение в трехмерном пространстве и поэтому используется как «эталон» для проверки новых методов.
В целом данные анализа движений по обычной видеозаписи хорошо совпадали с этим эталоном для основных параметров ходьбы. Например, у пациентов после инсульта и с болезнью Паркинсона оценки времени шага, длины шага и скорости ходьбы по видео сильно коррелировали с данными 3D-захвата движения. Метод также позволял улавливать клинически важные особенности: асимметрию шага после инсульта, наклон туловища при болезни Паркинсона и изменения ходьбы при переходе от обычной к более быстрой скорости. Но исследование проводилось в контролируемых условиях: боковая съемка обычно была точнее фронтальной, а некоторые параметры, особенно движения голеностопа и пространственные показатели при фронтальной съемке, оценивались менее надежно.
Систематический обзор обобщает исследования по автоматическому 2D- и 3D-видеоанализу двигательных расстройств с применением глубокого обучения [17]. Авторы рассмотрели задачи количественной оценки симптомов болезни Паркинсона, атаксии, дискинезии, тиков при синдроме Туретта, дистонии, нарушений ходьбы и других патологических движений. Обзор показывает, что видеоанализ быстро развивается как способ переводить клиническую оценку движений в количественные показатели: измерять скорость, амплитуду, ритм, симметрию и вариабельность движений, а не только описывать их субъективно.
Более клинически ориентированный систематический обзор [21] рассматривает, как компьютерное зрение используется для диагностики, оценки тяжести и мониторинга двигательных расстройств — прежде всего болезни Паркинсона, тремора, дистонии и тиков (рис. 13). Результаты выглядят перспективно, но пока это скорее область исследований и разработки цифровых биомаркеров, чем готовый клинический стандарт. При оценке качества по QUADAS-2 — инструменту для проверки диагностических исследований — во многих работах оставалось неясно, можно ли полностью доверять результатам. Например, не всегда было понятно, как отбирали пациентов, с чем сравнивали новый метод и знали ли оценщики диагноз заранее. Из-за этого результаты могли выглядеть лучше, чем они были бы в реальной клинической практике.

Рисунок 13. Компьютерное зрение и датчики в анализе двигательных нарушений. A) Компьютерное зрение анализирует постукивание пальцами: находит ключевые точки кисти, измеряет расстояние между большим и указательным пальцем и по изменению этого расстояния определяет, похоже ли движение на патологическое или нормальное. B) Показано сравнение двух подходов: инерциальные датчики (например, часы) измеряют ускорение и вращение руки, а видеоанализ по записи смартфона отслеживает движение пальцев без датчиков. Видеоанализ бесконтактен, но сильнее зависит от условий съемки.
Что развивается помимо сенсоров и видео
Помимо носимых сенсоров и видеоанализа, развиваются и другие технологические подходы. Один из них — бесконтактный радиоволновой мониторинг: система анализирует отражение радиосигналов от тела человека и по ним оценивает ходьбу дома, без камеры и без датчиков на пациенте [22]. В этом исследовании устройство установили дома у 50 участников, часть из которых имела болезнь Паркинсона, и наблюдали за ними до года. За это время система собрала больше 200 тысяч измерений скорости ходьбы. Главный результат был в том, что измеренная дома скорость ходьбы хорошо соотносилась с клинической тяжестью болезни, а длительное наблюдение позволяло отслеживать прогрессирование и изменения состояния после приема лекарств.
Главная ценность такого подхода не в том, что он заменяет клиническую оценку, а в том, что дает врачу более длинную и объективную картину движения пациента. Авторы рассматривают такой мониторинг как потенциальное дополнение к клинической оценке: данные о ходьбе, собранные дома, могут быть доступны врачу и помогать ему видеть не только состояние пациента на приеме, но и динамику движения в обычной жизни между визитами.
Еще одно направление — мультимодальные цифровые биомаркеры, где объединяют данные не только о ходьбе, но и о голосе, движениях рук, постукиванию пальцев и других задачах со смартфона; такие модели могут быть полезны для более раннего выявления болезни Паркинсона, потому что один тип данных часто слабее, чем их комбинация [20].
Ограничения современных методов
Главная проблема перечисленных выше подходов — отсутствие единого стандарта. В разных исследованиях использовали разные устройства, крепили их на разные части тела, собирали данные от суток до двух недель и по-разному определяли, какие эпизоды ходьбы учитывать. Из-за этого результаты трудно напрямую сравнивать. Кроме того, многие системы пока работают не в реальном времени: данные сначала записывают, потом выгружают и анализируют. Для обычной клинической практики нужно, чтобы врач получал понятный результат быстро и мог использовать его в принятии решений [14], [15].
Есть и практические ограничения. Если система неудобна, пожилой пациент не будет носить ее каждый день. Поэтому важны не только точность алгоритмов, но и комфорт, простота настройки, понятные инструкции, поддержка пользователя и защита данных. Чем больше датчиков, тем богаче информация, но тем ниже удобство. Поэтому для реального применения нужно найти баланс между точностью и носибельностью [15].
В целом эта область уже вышла за пределы идеи: есть исследования, прототипы, коммерческие устройства, алгоритмы распознавания симптомов и первые примеры использования в клинических испытаниях. Но до повсеместной практики еще нужен этап стандартизации и клинической валидации [14].
Цифровые методы, по крайней мере на данный момент, нельзя рассматривать как полную альтернативу привычной клинической оценки: цифровые технологии не заменяют врача и физиотерапевта, но могут дополнить данными то, что они видят на приеме, и помочь скорректировать диагноз или лечение.
Устройства, которые помогают двигаться: протезы, экзоскелеты и нейроуправление
В предыдущих частях мы разобрали движение как систему: есть команда к мышце, механическое сокращение, обратная связь от тела, спинальные рефлексы, проводящие пути. Это знание нужно не только для диагностики. Оно показывает, какие звенья двигательной системы можно попытаться заменить, усилить или обойти технически.
После оценки движения возникает следующий вопрос: если мы смогли определить сбой, можем ли мы его хотя бы частично компенсировать? Здесь важно различать две ситуации. В первой сама нервная система во многом продолжает работать: мозг формирует намерение, проводящие пути передают команды, мышцы культи могут сокращаться, но отсутствует часть тела, которая должна выполнить движение. Так обычно устроена задача протезирования после ампутации: инженерная система пытается встроить в сохраненный контур движения новое механическое звено.
Во второй ситуации конечность может быть сохранна, но нарушена сама природа управления движением: команда плохо проходит к мышцам, движение не запускается или становится нескоординированным. Так бывает, например, после инсульта, травмы спинного мозга, при паркинсонизме или других неврологических нарушениях, уже не раз упомянутых выше. Здесь технологии решают уже другую задачу: не заменить отсутствующую часть тела, а обойти поврежденный путь, поддержать слабое движение, вернуть обратную связь или заново связать намерение с действием.
Поэтому протезы, ортезы, экзоскелеты и нейроуправляемые системы можно рассматривать как продолжение той же темы. Клиническая и цифровая оценка помогают понять, где именно нарушено движение, а ассистивные технологии пытаются компенсировать это нарушение.
Протезы, ортезы и экзоскелеты
Протез заменяет утраченную часть тела — например, стопу, голень, кисть или всю конечность (рис. 14). В типичном случае эта ситуация возникает после ампутации: например, из-за травмы, опухоли, сосудистого поражения или осложнений диабета. Здесь сама логика управления движением часто частично сохранна: мозг может формировать намерение, мышцы культи — сокращаться, а человек — учиться новому способу опоры или захвата. Поэтому протез не лечит нарушение, а заменяет утраченное механическое звено и пытается встроиться в сохранившуюся двигательную систему.
Протезы различаются по способу крепления, уровню электронного управления и способности активно создавать движение. Самые простые — пассивные механические протезы: они работают за счет формы, шарниров, пружин, гидравлики или материалов, которые накапливают и возвращают энергию шага, но не имеют активного мотора. Более сложный вариант — микропроцессорные колени и стопы: встроенные датчики и микропроцессор помогают протезу подстраиваться под фазу шага, скорость и поверхность (рис. 14Б в крутилке). Бионические протезы объединяют механическую часть с электроникой, датчиками, моторами и алгоритмами управления (рис. 14В в крутилке); они могут считывать сигналы мышц или нервов пользователя и преобразовывать их в движение, а в экспериментальных вариантах [23] — еще и возвращать сенсорную обратную связь.

Рисунок 14А. Прототип протеза коленного сустава, Индия. Заменяет утраченную часть конечности после ампутации. Примеры микропроцессорного колена и бионического протеза — в крутилке, вращайте барабан!

Рисунок 14Б. Микропроцессорное колено. Такой протез анализирует движение и регулирует работу, например сопротивление в колене.

Рисунок 14В. Бионический протез. Интересный канал о том, как живет человек с бионическим протезом «Бионическая Россия».
С ортезами (рис. 16А) и экзоскелетами (рис. 16Б) ситуация другая: конечность обычно сохранена, но собственная двигательная система уже не обеспечивает движение достаточно надежно. После инсульта, травмы спинного мозга или при хронических неврологических заболеваниях человеку может не хватать силы, устойчивости и точного контроля. В таких случаях ортезы, экзоскелеты и реабилитационные роботы не заменяют руку или ногу, а поддерживают сохранившееся тело: помогают удерживать позу, направлять движение и компенсировать те функции, с которыми нервная система и мышцы уже не справляются.

Рисунок 16А. Ортез поддерживает или корректирует работу сохраненной части тела: его используют при слабости мышц, нестабильности суставов, нарушении походки, после травм или при некоторых неврологических заболеваниях. Экзоскелет — на рис. 16Б в крутилке!

Рисунок 16Б. Экзоскелет. Он надевается поверх тела и помогает двигать сохранившимися конечностями, например при плегии (полном параличе) или парезе (частичном параличе) после травмы спинного мозга или инсульта.
Экзоскелеты стоят отдельно от протезов и ортезов: они создают внешнюю роботизированную поддержку для корпуса и конечностей (рис. 16Б). Их используют либо как реабилитационный тренажер в клинике, либо как персональное средство вертикализации и ходьбы у строго отобранных пациентов. Коммерческие роботизированные экзоскелеты — Ekso, ReWalk, Indego, HAL и Rex — уже применялись в исследованиях у людей с травмой спинного мозга. Систематический обзор включил 41 исследование этих устройств и показал, что тренировки с экзоскелетом могут улучшать некоторые параметры ходьбы, но общие выводы ограничены [25].
Данные по роботизированной тренировке ходьбы после инсульта дает Cochrane-обзор 2025 года [26]. Он включает не только экзоскелеты, но и другие электромеханические устройства: роботизированные ортезы, тренажеры с движущимися платформами для стоп, мобильные системы и голеностопные роботы. Такие устройства вместе с физиотерапией повышали шанс восстановить самостоятельную ходьбу: если лечить девять человек, у одного из них удается избежать зависимости от постоянной помощи при ходьбе по сравнению с обычной реабилитацией.
Более узкий обзор 2021 года был посвящен именно носимым экзоскелетам нижних конечностей [27]. В него вошли клинические исследования у людей с нарушениями движений вследствие травмы спинного мозга, реже после инсульта и других заболеваний нервной системы. При травме спинного мозга экзоскелеты в основном показывали, что человек может вставать, тренировать шаг и передвигаться с внешней роботизированной поддержкой, но доказательства эффективности оставались слабыми: большинство работ были пилотными или наблюдательными, а рандомизированных исследований с этой группой в обзор не вошло. Данные по инсульту были более надежными, потому что в обзор вошли несколько рандомизированных исследований . Но эффект зависел от устройства и выбранного показателя: в одних работах использование экзоскелета улучшало скорость ходьбы, длина шага, симметрия или самостоятельность при передвижении, а в других экзоскелет не давал преимущества перед обычной терапией по части этих параметров.
Подробнее о том, что такое рандомизированные контролируемые исследования (РКИ) — в спецпроекте Биомолекулы про клинические исследования: «С миру по нитке: как соединились компоненты клинического исследования» [28].
От механики к бионике: как устроены современные протезы
В систематическом обзоре авторы собрали исследования о микропроцессорных коленных модулях [29]. Такие протезы чаще давали лучшие результаты, чем обычные механические коленные модули: люди быстрее и увереннее ходили, лучше справлялись с повседневной активностью и выше оценивали качество жизни. Отдельно авторы рассматривали безопасность, но в основном через риск падений. С одной стороны, в части попавших в обзор исследований отмечалось, что микропроцессорные колени были связаны с более благоприятными показателями безопасности, прежде всего с меньшим риском или частотой падений и большей уверенностью при ходьбе. С другой — этот эффект не был одинаково показан для всех устройств, групп пациентов и показателей безопасности. Кроме того, медицинские осложнения, такие как боль, кожные повреждения, инфекции, а также поломки устройства и другие нежелательные события, систематически не анализировались.
Отдельно развиваются активные и квазипассивные протезы стопы и голеностопа. Пассивные протезы механически поддерживают шаг, квазипассивные могут адаптироваться к поверхности или сохранять и возвращать энергию, а активные используют мотор или актуатор и сами добавляют усилие при движении. В систематическом обзоре авторы сравнили, как такие устройства влияют на повседневную активность людей с ампутацией нижней конечности [30]. Квазипассивные и активные протезы часто давали лучшие краткосрочные результаты по ходьбе, энергозатратам, функциональным тестам и субъективным ощущениям, чем обычные пассивные протезы.
По данным ВОЗ, протезы и ортезы помогают людям с физическими нарушениями сохранять независимость, учиться, работать и участвовать в социальной жизни, но доступ к таким технологиям часто ограничен — это и высокая стоимость; и нехватка подготовленных специалистов по протезированию и ортезированию; и недостаточное число протезно-ортезических центров, где могут оценить потребности человека, снять мерки, подготовить протез или ортез, обучить пользоваться, отремонтировать; и трудности с поставкой компонентов; и слабой интеграцией этих услуг в систему здравоохранения и реабилитации. ВОЗ отдельно пишет, что во многих странах сервисы либо отсутствуют, либо сосредоточены в крупных городах, а доступ дополнительно ограничен недостаточным финансированием и отсутствием системной государственной политики в сфере протезно-ортезической помощи.
Когда протез соединяется с телом глубже: нейроуправление
Самое инновационное направление в протезировании — нейроуправляемые протезы, где движение связано с сигналами оставшихся у пациента мышц или нервов, даже если они не полностью функциональны. Например, в исследовании 2024 года [31], где у части пациентов при ампутации хирургически соединили остаточные мышцы-агонисты и антагонисты — такую схему называют agonist–antagonist myoneural interface, AMI. Это не случай инсульта или паркинсонизма: у участников не была разрушена сама система запуска движения, но после ампутации исчез голеностоп и нарушилась нормальная связь между мышечной командой, движением и обратной связью. Идея AMI в том, чтобы мышцы культи продолжали растягивать друг друга и создавать хотя бы часть той проприоцептивной информации, которая обычно идет от настоящего сустава.
В эксперименте участники после AMI-реконструкции ходили быстрее, чем участники контрольной группы с ампутацией ниже колена без AMI, хотя обе группы использовали один и тот же экспериментальный активный бионический голеностоп: максимальная скорость составила 1,78 м/с против 1,26 м/с. Бионический голеностоп также создавал почти в три раза бóльшую пиковую мощность отталкивания, хотя до полностью естественной механики это все равно не дотягивало: по оценке авторов, показатели составляли около 65% от значений у людей без ампутации. Кроме того, участники с AMI лучше адаптировали движение бионического голеностопа к наклону и лестнице, тогда как контрольная группа без AMI такой биомиметической адаптации не демонстрировала. Звучит здорово, но ограничения есть: это пока не массовая технология, и нет надежных доказательств долгосрочной клинической пользы. Исследование было небольшим, не рандомизированным, и проведено только в лабораторных условиях, а устойчивость эффекта в повседневной жизни еще предстоит проверить.
Еще более сложный пример — нейромышечно-скелетный протез руки (рис. 17) [23]. Это не просто остеоинтегрированный протез: он крепится к кости через остеоинтеграцию, но дополнительно считывает сигналы с имплантированных электродов в мышцах и нервах и может возвращать человеку ощущение прикосновения. У трех пациентов, за которыми удалось наблюдать, такая система работала в повседневной жизни от 3 до 7 лет: люди лучше управляли протезом, больше ему доверяли, использовали его в работе и обычных делах, а у двух пациентов исчезла фантомная боль. Но это пока не доказательство клинической эффективности, а демонстрация осуществимости технологии: всего четыре случая, без контрольной группы и рандомизации, а у одного пациента возникли серьезные осложнения — сепсис и инфекция, из-за которой электроды пришлось удалить.

Рисунок 17. Нейромышечно-скелетный протез руки, имплантированный мужчине, который потерял правую руку в 1997 году из-за травмы на нефтяной платформе. Сначала он пробовал обычный протез с гильзой, но почти перестал им пользоваться из-за дискомфорта и плохой функциональности. Позже у него появились боли в спине из-за асимметрии тела, а еще была фантомная боль в руке — он описывал ее как «колющую» и «судорожную», 3 из 10 по интенсивности. В 2014 году ему сделали остеоинтегрированный протез, но управление через поверхностные электроды все равно было плохим. В 2017 году ему пересадили нервы и имплантировали нейромышечно-скелетный интерфейс. После этого он смог пользоваться протезом в обычной жизни, в том числе заниматься ориентированием, греблей на каноэ и лыжами; фантомная боль у него полностью прошла.
Важно не забывать, что описанные выше технологии находятся на разных стадиях зрелости. Механические протезы и ортезы уже стали обычной частью помощи, но более сложные решения остаются значительно менее доступными: микропроцессорные протезы дороги, остеоинтеграция и нейроуправляемые системы требуют специализированной хирургии и строгого отбора, а персональные экзоскелеты пока трудно представить как массовое повседневное средство. Качество клинических доказательств тоже неоднородное. За отдельными устройствами стоят систематические обзоры и рандомизированные исследования, но многие выводы все еще опираются на небольшие выборки, короткое наблюдение, разные протоколы, наблюдательные работы или единичные клинические случаи. Поэтому отношение к этим технологиям скорее умеренно-позитивное: они могут заметно помочь отдельным пациентам и частично компенсировать конкретные нарушения движения, но пока не являются универсальным способом вернуть нормальную ходьбу, точное управление рукой или полноценную сенсорную обратную связь.
Нейроинтерфейсы: от выбора букв до восстановления движения
Интерфейс «мозг–компьютер» (Brain–Computer Interface, BCI) — это технология, которая регистрирует активность мозга, обрабатывает ее алгоритмами и превращает в команду для компьютера или внешнего устройства. Идея такого интерфейса была предложена Жаком Видалем в 1973 году, почти через 50 лет после первой регистрации ЭЭГ у человека. Тогда BCI описывали как прямой канал связи между мозгом и компьютерной системой [32]. Важно, что «прямой» здесь не значит «инвазивный». Речь о другом: команда передается без участия мышц.
На «Биомолекуле» уже выходила масса статей на эту тему, и, хотя тот материал, что вы читаете сейчас, безусловно глубже, предлагаем ознакомиться и с более ранними работами: «Киборги сегодня: нейрокомпьютерные технологии становятся неотъемлемой частью нашей жизни» [33], «Нейроинтерфейсы и чтение мыслей. Способен ли «Призрак в доспехах» стать реальностью?» [34], «Борьба мозга с нейроинтерфейсами. Что мешает нам попасть в киберпанк?» [35], «Нейроинтерфейсы: как наука ставит людей на ноги» [36] и «Нейротехнологии Илона Маска» [37].
В обычном взаимодействии с компьютером команда все равно проходит через тело: человек нажимает клавишу, двигает мышь, касается экрана, переводит взгляд на нужный элемент или произносит голосовую команду. BCI пытается обойти этот путь за счет того, что система считывает активность мозга и преобразует ее в команду без взаимодействия с мышцами (табл. 1). Впрочем, и тут есть исключения, о которых мы еще поговорим ниже.
|
до BCI |
мозг |
→ |
мышцы, руки , глаз, рот |
→ |
клавиатура, мышь, речь |
→ |
компьютер |
|
ВСI |
активность мозга |
→ |
ЭЭГ |
→ |
алгоритм |
→ |
команда компьютеру |
BCI-технология особенно значима для нейрореабилитации, ассистивных технологий, коммуникации людей с двигательными нарушениями, а также для более широких сфер, включая развлечения и адаптивные интерфейсы. Но для темы движения особенно важна другая ветка — BCI, которые работают с активностью моторной и сенсомоторной системы.
Двигательные BCI на основе сенсомоторных ритмов
Одним из ключевых направлений развития BCI стали интерфейсы, связанные с движением. Это объясняется тем, что двигательное намерение имеет относительно хорошо изученные нейрофизиологические корреляты: при реальном и воображаемом движении или даже при попытке движения изменяется активность сенсомоторной коры. Поэтому такие сигналы можно использовать не только для управления внешними устройствами — курсором, роботом, ортезом или протезом — но и для нейрореабилитации, где важно восстановить связь между намерением движения и сенсорной обратной связью.
В отличие от P300 и похожих интерфейсов, где пользователь выбирает команду через реакцию на внешний стимул, двигательные BCI опираются на активность моторной системы пользователя. Во всех случаях задача алгоритма — распознать моторное намерение по изменениям мозговой активности.
В парадигме моторного воображения (motor imagery) пользователь мысленно представляет движение — например, левой или правой руки. Система при этом распознает не вызванный потенциал, а изменение мощности текущих ЭЭГ-ритмов в сенсомоторной коре [40]. Когда человек двигает рукой или даже только представляет движение, ритмы перестраиваются: одни компоненты становятся слабее, другие — сильнее.
Эти изменения описывают терминами ERD (event‑related desynchronization) и ERS (event‑related synchronization). ERD — событийно-связанная десинхронизация — это снижение мощности определенного ЭЭГ-ритма после события. Например, при реальном или воображаемом движении руки снижается мощность мю- и бета-ритмов в сенсомоторной коре. ERS — событийно-связанная синхронизация — наоборот, означает усиление ритма. Отдельно интересен феномен бета-ребаунда: усиление бета-ритма после завершения движения или иногда после воображаемого движения.
Для реабилитации это важно потому, что BCI может заново связать намерение движения с обратной связью. Так мозг получает согласованный сенсомоторный опыт: попытка движения снова приводит к видимому или ощутимому результату.
Зачем BCI нужна обратная связь
Выше мы уже обсуждали, что для движения недостаточно одной команды «сжать кисть» или «поднять руку». Нормальное действие работает как замкнутый контур: мозг формирует намерение, тело выполняет движение, а сенсорная система сообщает, что получилось.
Современные BCI все чаще строятся как системы с обратной связью. Она может быть зрительной: человек видит, как двигается виртуальная рука. Может быть тактильной: датчики в протезе регистрируют прикосновение, а стимуляция нервов или коры создает ощущение контакта. Может быть мышечной: при распознавании моторного намерения система включает электростимуляцию, и человек видит или ощущает реальное движение своей конечности.
В работе группы Питтсбургского университета, опубликованной в Science в 2021 году [41], которую стоит воспринимать прежде всего как демонстрацию идеи, показали, зачем нейропротезу нужна не только команда, но и обратная связь. Участник с тетраплегией управлял роботизированной рукой через инвазивный BCI: активность моторной коры использовали для управления движением, а стимуляция соматосенсорной коры вызывала искусственные ощущения прикосновения. Когда к зрительному контролю добавляли тактильную обратную связь, задания с захватом и переносом предметов выполнялись почти вдвое быстрее: медианное время успешных попыток сократилось с 20,9 до 10,2 секунды. Это был эксперимент на одном человеке, поэтому уровень доказательств ограничен, но сама идея важна: для естественного управления движением мозгу нужна не только команда «двигай», но и сигнал о прикосновении.
BCI на практике: реабилитация после инсульта
После инсульта проблема часто не сводится к тому, что мышца «слабая». Нарушается вся петля управления движением: человек пытается пошевелить рукой, но команда плохо доходит до мышц, движение получается неполным или не возникает вовсе, а мозг не получает нормальной обратной связи от выполненного действия. BCI-реабилитация пытается вмешаться именно в этот разрыв.
В большинстве таких протоколов используют неинвазивные BCI на основе сенсомоторных ритмов. Пациент пытается выполнить движение или представляет его, система распознает соответствующую активность мозга и сразу дает обратную связь: включает ортез, роботизированную поддержку, визуальное движение руки на экране или электростимуляцию мышц. Смысл не просто в том, чтобы «тренировать мозг», а в том, чтобы снова связать намерение движения с видимым или ощущаемым результатом.
Ранний метаанализ BCI-реабилитации после инсульта показал более выраженное улучшение функции верхней конечности по шкале Фугл–Мейер по сравнению с контролем [42]. Эффект оценивался как средний или крупный, но уверенность в точной величине была ограничена: исследования были небольшими, а протоколы заметно различались.
Особенно логичной выглядит комбинация BCI с функциональной электростимуляцией (functional electrical stimulation, FES) мышц. В этом варианте система не просто показывает пациенту обратную связь, а вызывает реальное сокращение мышц. Пациент пытается или представляет движение, BCI распознает эту попытку, а FES возвращает движение в тело. Именно поэтому BCI-FES рассматривают как один из способов замкнуть сенсомоторную петлю: пациент пытается или представляет движение, BCI распознает соответствующую активность мозга, а FES возвращает движение в тело через сокращение мышц.
- Функциональная электростимуляция мышц (functional electrical stimulation, FES) —
- метод, при котором слабые электрические импульсы подают на мышцы или периферические нервы, чтобы вызвать контролируемое сокращение мышцы и тем самым восстановить или поддержать движение. Проще говоря, FES временно берет на себя роль нервного сигнала: если мозг или спинной мозг не могут нормально передать команду к мышце, стимулятор помогает мышце сократиться извне.
Метаанализ 2024 года после инсульта показал умеренное улучшение функции верхней конечности при BCI-FES [43]. Эффект был заметнее, когда BCI-FES добавляли к обычной реабилитации, и слабее, когда его напрямую сравнивали с одной только функциональной электростимуляцией. Это важная оговорка: часть пользы может быть связана не с «мозговым интерфейсом» как таковым, а с тем, что пациент получает более интенсивную и структурированную тренировку.
Более свежий метаанализ 2025 года тоже показал статистически значимое, но умеренное дополнительное улучшение функции руки: в среднем около 3,7 балла по FMA-UE по сравнению с контролем [44]. Наиболее перспективной формой обратной связи снова выглядела BCI-FES, причем эффект отмечался и в подостром, и в отдаленном периоде инсульта. Но перенос в повседневную жизнь пока менее убедителен: по Modified Barthel Index, который отражает бытовую самостоятельность, значимого улучшения не получили.
BCI на основе попытки выполнения движения (motor attempt BCI)
Ключевая идея этой парадигмы ВСI в том, что пациент не просто представляет движение, а действительно пытается пошевелить парализованной или паретичной рукой, даже если само движение почти или совсем не получается.
В исследовании участвовали пациенты с последствиями инсульта в виде тяжелого пареза руки [45]. В экспериментальной группе движение ортеза было связано с мозговой активностью пациента, а в контрольной группе ортез двигался случайно, не завися от ЭЭГ-сигнала. Эффективность оценивали по шкале Фугл–Мейер для верхней конечности. Результат снова был умеренным, но значимым: группа с настоящим BCI улучшилась по шкале примерно на 3,4 балла, что для пациента достаточно скромно. Это не означало, что рука полностью восстановилась. Скорее, у части пациентов появлялась или усиливалась мышечная активность, которая до тренировки почти не проявлялась. То есть BCI помогал «перезапустить» связь между намерением движения, активностью мозга и реальным движением конечности через ортез.
Имплантируемые BCI (implantable BCI, iBCI): более точный сигнал и управление нейропротезами
Отдельную ветку двигательных нейроинтерфейсов составляют iBCI — в литературе о нейропротезах их также часто называют BMI, brain–machine interfaces. В отличие от ЭЭГ–BCI, где сигнал регистрируется с поверхности головы, здесь электроды размещаются внутри черепа: на поверхности коры, как при ECoG (electrocorticography), или непосредственно в коре с помощью микроэлектродных массивов. Это позволяет получать более детальный сигнал, связанный с намерением движения, и использовать его для управления внешними устройствами.
iBCI пока остаются экспериментальными клиническими системами [46]. В упрощенном виде это замкнутый контур между мозгом, компьютером и внешним устройством. Имплантированные электроды считывают активность нужных зон мозга: например, областей, связанных с речью или движением. Затем сигнал переводится из аналогового в цифровой, очищается и декодируется алгоритмами — компьютер пытается понять, какое действие человек намеревается выполнить (рис. 23). После этого расшифрованный сигнал управляет внешним устройством: синтезатором речи, курсором, роботизированной рукой, протезом или системой электростимуляции мышц. Важная часть схемы — обратная связь: человек видит движение, слышит сгенерированную речь или получает искусственное тактильное ощущение. В некоторых системах для этого дополнительно стимулируют сенсорную кору — например, с помощью внутрикорковой микростимуляции (ВКМС), чтобы мозг получал не только «выход», но и сигнал обратно. Так пациент постепенно учится точнее управлять системой.
В обзоре всех найденных клинических испытаний iBCI для коммуникации, моторного контроля и восстановления тактильного восприятия за 1998–2023 годы нашли 21 исследовательскую группу, 28 клинических испытаний и 67 участников с имплантами (заодно проанализировали типы имплантов, области применения, длительность участия, стабильность работы систем, представленность участников, регуляторные барьеры и проблемы клинического внедрения) [46]. На момент обзора ни одна iBCI-система еще не была одобрена регуляторами как медицинское устройство для рынка.

Рисунок 19. Обзор имплантируемых BCI-систем. Электрод регистрирует нервный сигнал, а аналого-цифровой преобразователь переводит его в цифровой формат и передает на компьютер. Там сигнал проходит предварительную обработку и декодирование: система «понимает», какое действие человек хочет выполнить. После этого команда может управлять компьютерной программой или внешним устройством — например, протезом руки. Обратная связь от программы или устройства помогает пользователю постепенно лучше настраивать управление и точнее пользоваться системой. В некоторых протезах есть еще и тактильная обратная связь: датчики в протезе регистрируют прикосновения, а затем эта информация передается на имплантированные электроды. С помощью ВКМС имитируется ощущение прикосновения, то есть протез не только выполняет движение, но и частично «возвращает» человеку чувство осязания.
[46] (с модификациями)
В 2004 году в проекте BrainGate Мэтью Нейглу, участнику с травмой спинного мозга и тетраплегией, имплантировали внутрикоровой микроэлектродный массив в моторную кору [47]. С его помощью он использовал намерение движения руки для управления двухмерным курсором, телевизором, электронной почтой, а также для открытия и закрытия протезной кисти. Имплант был рассчитан на длительное применение, но система не была постоянно работающим бытовым устройством: Нейгл подключался к компьютеру и внешнему оборудованию во время исследовательских сессий. По протоколу устройство удалили примерно через год; сам Нейгл умер в 2007 году от сепсиса, уже после удаления импланта. В СМИ его смерть описывается как не связанная с имплантом.
В исследовании 2013 года сигнал мозга использовали не только для управления курсором или роботизированной рукой, но и для движения собственной парализованной руки [48]. Участнику Биллу Кочевару (рис. 20) с тетраплегией имплантировали микроэлектроды в моторную кору, а в мышцы руки — электроды для функциональной электростимуляции. Когда он пытался выполнить движение, система считывала активность моторной коры, декодировала намерение и запускала стимуляцию нужных мышц. В результате участник смог по собственной воле выполнять движения рукой: тянуться, хватать предметы, пить через трубочку и есть. В этом случае имплант так же работал не постоянно: когда систему выключали, функциональные движения исчезали. Позже Билл умер в декабре 2017 года в возрасте 56 лет; его смерть описывают как не связанную с исследованием.

Рисунок 20. Билл Кочевар был парализован после велосипедной аварии в 2006 году. Позже он стал участником эксперимента, в котором исследователи фактически «обошли» поврежденный спинной мозг с помощью двух связанных систем: электроды в моторной коре считывали его намерение двигать рукой, а система функциональной электростимуляции в руке активировала нужные мышцы. Благодаря этому мозговой сигнал снова мог приводить к движению парализованной руки и кисти.
В марте 2026 года Reuters сообщил, что китайский регулятор NMPA — National Medical Products Administration — одобрил рыночный запуск инвазивной BCI-системы компании Borui Kang Medical Technology, также известной как Neuracle, для пациентов с тетраплегией после шейной травмы спинного мозга. Система использует минимально инвазивную эпидуральную имплантацию и беспроводную передачу сигнала, а восстановление захвата кисти реализуется через специальную перчатку.
Интерфейс «мозг–спинной мозг»: цифровой мост для ходьбы
В 2023 году описали еще более радикальный вариант — интерфейс «мозг–спинной мозг», или «цифровой мост» [49]. Участником был один мужчина с последствиями неполной травмы шейного отдела спинного мозга, которая произошла примерно за 10 лет до исследования. Важно, что этот участник раньше уже участвовал в протоколе со спинальной стимуляцией, ему уже была имплантирована система эпидуральной стимуляции спинного мозга, и он несколько лет тренировался с ней дома. В новом исследовании к этой системе добавили два корковых ECoG-импланта над сенсомоторной корой: они считывали намерение движения ног, а алгоритм переводил его в команды для стимуляции спинного мозга.
Когда система работала, участник мог более естественно стоять, идти с костылями, останавливаться, подниматься по рампе и проходить по сложной поверхности. Когда «цифровой мост» выключали, возможность сделать шаг в этих тестах сразу пропадала, хотя после курса тренировок у него появились и некоторые улучшения без стимуляции. Система была рассчитана на длительное использование, и ее применяли дома; но она все еще требовала внешней гарнитуры, блока обработки и настройки, то есть это не полностью автономный бытовой имплант.
Уровень доказательств здесь пока очень ограниченный: это только демонстрация принципа на одном человеке. Риски, к сожалению, не теоретические: один из корковых имплантов пришлось удалить через 167 дней из-за подкожной инфекции, а затем и вовсе заменить.
Гибридный BCI: мозг + мышцы
Перспективное направление — гибридные BCI, которые анализируют не только активность мозга, но и мышечную активность. После инсульта проблема часто заключается не только в том, что мозгу трудно запустить движение. Нарушается сама передача команды к мышцам: мышцы включаются слабо, с задержкой, не вовремя или вместе с не теми мышечными группами, которые нужны.
В работе, опубликованной в 2019 году в Journal of Neuroscience Methods, предложили объединить ЭЭГ и ЭМГ для управления ортезом кисти в нейрореабилитации [50]. ЭЭГ отражала активность мозга, ЭМГ — активность мышцы, а ключевым признаком стала кортико-мышечная связь, то есть согласованность между активностью моторной коры и целевой мышцы. Проще говоря, система оценивала не только мозговое намерение движения, но и то, появляется ли связанная с ним мышечная активность.
В исследовании участвовали здоровые добровольцы и пациенты с постинсультным гемипарезом — снижением силы мышц одной стороны тела — после инсульта. Они выполняли или пытались выполнять простые движения кистью с помощью ортеза. У пациентов попытку движения удавалось распознавать с точностью около 84–85%; классификация опиралась на короткое, примерно секундное окно ЭЭГ- и ЭМГ-сигналов в первые секунды после подсказки. Важно понимать, что работа не доказывала клиническое восстановление после терапии, а проверяла сам технический принцип: гибридный BCI может ориентироваться не только на мозговое намерение, но и на связь между мозговой активностью и мышечным ответом.
Декодировать намерение
Следующая граница BCI — декодировать не только движение, но и цель действия. Современные системы чаще всего распознают относительно простые команды: представить движение левой руки, сжать кисть, выбрать стимул, переместить курсор. Это уже много, но такое управление остается механистическим. Человек хочет не «активировать мышцу под таким-то углом», а взять чашку, поднести ложку ко рту, удержать предмет, открыть дверь.
Поэтому в одной из концептуальных работ обсуждают BCI, ориентированные не только на моторную команду, но и на намерение действия [51]. Идея в том, что мозг планирует движение через ожидаемый результат. Мы заранее представляем, что должно получиться: предмет окажется в руке, чашка приблизится ко рту, пальцы почувствуют поверхность. Если BCI сможет учитывать не только активность моторной коры, но и более широкие сети планирования действия — теменные, премоторные, сенсорные и фронтальные области, — управление может стать более естественным.
Сейчас это всего лишь программа развития, остаются сложные вопросы: какие нейронные признаки действительно отражают намерение, как отличить намерение от случайной мысли, как защитить приватность ментальных состояний и кто несет ответственность, если система ошибочно интерпретирует команду.
Заключение
В ближайшие годы эти технологии, скорее всего, будут развиваться не как единая «чудо-замена» врачу, а как набор специализированных инструментов вокруг клинической практики. Носимые датчики, видеоанализ и домашний мониторинг могут сделать оценку движения более длительной, точной и приближенной к реальной жизни. Протезы, экзоскелеты и BCI, в свою очередь, показывают, что технологии уже способны не только измерять нарушение, но и частично компенсировать его.
Однако между впечатляющим экспериментом и массовым медицинским применением остается большая дистанция. Нужны крупные исследования, единые протоколы, понятные клинические показатели, оценка рисков, стоимости и долгосрочной пользы. Особенно важно не подменять эффектной демонстрацией вопрос о том, станет ли устройство удобным, безопасным и доступным в повседневной жизни.
Будущее, вероятно, будет не за одной технологией, а за их сочетанием: датчики помогут точнее видеть проблему, алгоритмы — распознавать изменения, а реабилитационные и нейроуправляемые системы — подбирать более индивидуальную помощь. При этом врач, физический терапевт и сам пациент останутся центральными участниками процесса. Технологии могут дать медицине более чувствительные инструменты наблюдения восстановления, но их ценность будет определяться не сложностью устройства, а тем, улучшает ли оно жизнь конкретного человека.
Литература
- Мозговой штурм: краткая история медицинских нейротехнологий;
- Молекула здравого ума;
- Генная терапия нейромоторных болезней;
- Sarah Meyer, Auli H. Karttunen, Vincent Thijs, Hilde Feys, Geert Verheyden. (2014). How Do Somatosensory Deficits in the Arm and Hand Relate to Upper Limb Impairment, Activity, and Participation Problems After Stroke? A Systematic Review. Physical Therapy. 94, 1220-1231;
- Lijiao Meng, Qiu Liang, Jianrong Yuan, Siyi Li, Yanlei Ge, et. al. (2023). Vestibular rehabilitation therapy on balance and gait in patients after stroke: a systematic review and meta-analysis. BMC Med. 21;
- Julia U. Henschke, Janelle M. P. Pakan. (2023). Engaging distributed cortical and cerebellar networks through motor execution, observation, and imagery. Front. Syst. Neurosci. 17;
- Ликбез по ЦНС;
- Peerapat Suputtitada, Valton Costa, Felipe Fregni. (2025). The role of the contralesional primary motor cortex in upper limb recovery after stroke: a scoping review following PRISMA-ScR guidelines. BMC Neurosci. 26;
- Maximilien Metaireau, François Osiurak, Arthur Seye, Mathieu Lesourd. (2024). The neural correlates of limb apraxia: An anatomical likelihood estimation meta-analysis of lesion-symptom mapping studies in brain-damaged patients. Neuroscience & Biobehavioral Reviews. 162, 105720;
- David R. Williams, Irene Litvan. (2013). Parkinsonian Syndromes. Continuum. 19, 1189-1212;
- Recommended Policy for Electrodiagnostic Medicine. (2023). American Association of Neuromuscular & Electrodiagostic Medicine;
- Мозг под наблюдением: путеводитель по методам нейровизуализации;
- Purvi L Jadhwani, Pallavi Harjpal. (2023). A Review of Artificial Intelligence-Based Gait Evaluation and Rehabilitation in Parkinson’s Disease. Cureus;
- Cameron Kirk, Emma Packer, Ashley Polhemus, Mhairi K. MacLean, Harry Bailey, et. al. (2025). A systematic review of real-world gait-related digital mobility outcomes in Parkinson’s disease. npj Digit. Med. 8;
- Marco Sica, Salvatore Tedesco, Colum Crowe, Lorna Kenny, Kevin Moore, et. al. (2021). Continuous home monitoring of Parkinson’s disease using inertial sensors: A systematic review. PLoS ONE. 16, e0246528;
- Jan Stenum, Melody M. Hsu, Alexander Y. Pantelyat, Ryan T. Roemmich. (2024). Clinical gait analysis using video-based pose estimation: Multiple perspectives, clinical populations, and measuring change. PLOS Digit Health. 3, e0000467;
- Wei Tang, Peter M.A. van Ooijen, Deborah A. Sival, Natasha M. Maurits. (2024). Automatic two-dimensional & three-dimensional video analysis with deep learning for movement disorders: A systematic review. Artificial Intelligence in Medicine. 156, 102952;
- Wee-Shin Lim, Sung-Pin Fan, Shu-I Chiu, Meng-Ciao Wu, Pu-He Wang, et. al. (2025). Smartphone-derived multidomain features including voice, finger-tapping movement and gait aid early identification of Parkinson’s disease. npj Parkinsons Dis. 11;
- Amin Ahmadi, Francois Destelle, David Monaghan, Kieran Moran, Noel E. O'Connor, et. al. (2015). Human gait monitoring using body-worn inertial sensors and kinematic modelling. 2015 IEEE SENSORS. 1-4;
- Глаза прогресса: как глубокое обучение помогает видеть невидимое для человека;
- Pasquale Maria Pecoraro, Luca Marsili, Alberto J. Espay, Matteo Bologna, Lazzaro di Biase. (2025). Computer Vision Technologies in Movement Disorders: A Systematic Review. Movement Disord Clin Pract. 12, 1229-1243;
- Yingcheng Liu, Guo Zhang, Christopher G. Tarolli, Rumen Hristov, Stella Jensen-Roberts, et. al. (2022). Monitoring gait at home with radio waves in Parkinson’s disease: A marker of severity, progression, and medication response. Sci. Transl. Med. 14;
- Max Ortiz-Catalan, Enzo Mastinu, Paolo Sassu, Oskar Aszmann, Rickard Brånemark. (2020). Self-Contained Neuromusculoskeletal Arm Prostheses. N Engl J Med. 382, 1732-1738;
- Jacqueline S. Hebert, Mayank Rehani, Robert Stiegelmar. (2017). Osseointegration for Lower-Limb Amputation. JBJS Rev. 5, e10-e10;
- Federica Tamburella, Matteo Lorusso, Marco Tramontano, Silvia Fadlun, Marcella Masciullo, Giorgio Scivoletto. (2022). Overground robotic training effects on walking and secondary health conditions in individuals with spinal cord injury: systematic review. J NeuroEngineering Rehabil. 19;
- Jan Mehrholz, Joachim Kugler, Marcus Pohl, Bernhard Elsner. (2025). Electromechanical-assisted training for walking after stroke. Cochrane Database of Systematic Reviews. 2025;
- Antonio Rodríguez-Fernández, Joan Lobo-Prat, Josep M. Font-Llagunes. (2021). Systematic review on wearable lower-limb exoskeletons for gait training in neuromuscular impairments. J NeuroEngineering Rehabil. 18;
- С миру по нитке: как соединились компоненты клинического исследования;
- Aurore Thibaut, Charlotte Beaudart, Benoit Maertens de Noordhout, Sybille Geers, Jean-François Kaux, Doriane Pelzer. (2022). Impact of microprocessor prosthetic knee on mobility and quality of life in patients with lower limb amputation: a systematic review of the literature. Eur J Phys Rehabil Med. 58;
- Elke Lathouwers, María Alejandra Díaz, Alexandre Maricot, Bruno Tassignon, Claire Cherelle, et. al. (2023). Therapeutic benefits of lower limb prostheses: a systematic review. J NeuroEngineering Rehabil. 20;
- Hyungeun Song, Tsung-Han Hsieh, Seong Ho Yeon, Tony Shu, Michael Nawrot, et. al. (2024). Continuous neural control of a bionic limb restores biomimetic gait after amputation. Nat Med. 30, 2010-2019;
- J J Vidal. (1973). Toward Direct Brain-Computer Communication. Annu. Rev. Biophys. Bioeng. 2, 157-180;
- Киборги сегодня: нейрокомпьютерные технологии становятся неотъемлемой частью нашей жизни;
- Нейроинтерфейсы и чтение мыслей. Способен ли «Призрак в доспехах» стать реальностью?;
- Борьба мозга с нейроинтерфейсами. Что мешает нам попасть в киберпанк?;
- Нейроинтерфейсы: как наука ставит людей на ноги;
- Нейротехнологии Илона Маска;
- L.A. Farwell, E. Donchin. (1988). Talking off the top of your head: toward a mental prosthesis utilizing event-related brain potentials. Electroencephalography and Clinical Neurophysiology. 70, 510-523;
- Hikaru Sato, Yoshikazu Washizawa. (2016). An N100-P300 Spelling Brain-Computer Interface with Detection of Intentional Control. Computers. 5, 31;
- G. Pfurtscheller, F.H. Lopes da Silva. (1999). Event-related EEG/MEG synchronization and desynchronization: basic principles. Clinical Neurophysiology. 110, 1842-1857;
- Sharlene N. Flesher, John E. Downey, Jeffrey M. Weiss, Christopher L. Hughes, Angelica J. Herrera, et. al. (2021). A brain-computer interface that evokes tactile sensations improves robotic arm control. Science. 372, 831-836;
- María A. Cervera, Surjo R. Soekadar, Junichi Ushiba, José del R. Millán, Meigen Liu, et. al. (2018). Brain‐computer interfaces for post‐stroke motor rehabilitation: a meta‐analysis. Ann Clin Transl Neurol. 5, 651-663;
- Chunlin Ren, Xinmin Li, Qian Gao, Mengyang Pan, Jing Wang, et. al. (2024). The effect of brain-computer interface controlled functional electrical stimulation training on rehabilitation of upper limb after stroke: a systematic review and meta-analysis. Front. Hum. Neurosci. 18;
- Dan Li, Ruoyu Li, Yunping Song, Wenting Qin, Guangli Sun, et. al. (2025). Effects of brain-computer interface based training on post-stroke upper-limb rehabilitation: a meta-analysis. J NeuroEngineering Rehabil. 22;
- Ander Ramos‐Murguialday, Doris Broetz, Massimiliano Rea, Leonhard Läer, Özge Yilmaz, et. al. (2013). Brain–machine interface in chronic stroke rehabilitation: A controlled study. Annals of Neurology. 74, 100-108;
- K. Michelle Patrick-Krueger, Ian Burkhart, Jose L. Contreras-Vidal. (2024). The state of clinical trials of implantable brain–computer interfaces. Nat Rev Bioeng. 3, 50-67;
- Leigh R. Hochberg, Mijail D. Serruya, Gerhard M. Friehs, Jon A. Mukand, Maryam Saleh, et. al. (2006). Neuronal ensemble control of prosthetic devices by a human with tetraplegia. Nature. 442, 164-171;
- Jennifer L Collinger, Brian Wodlinger, John E Downey, Wei Wang, Elizabeth C Tyler-Kabara, et. al. (2013). High-performance neuroprosthetic control by an individual with tetraplegia. The Lancet. 381, 557-564;
- Henri Lorach, Andrea Galvez, Valeria Spagnolo, Felix Martel, Serpil Karakas, et. al. (2023). Walking naturally after spinal cord injury using a brain–spine interface. Nature. 618, 126-133;
- Anirban Chowdhury, Haider Raza, Yogesh Kumar Meena, Ashish Dutta, Girijesh Prasad. (2019). An EEG-EMG correlation-based brain-computer interface for hand orthosis supported neuro-rehabilitation. Journal of Neuroscience Methods. 312, 1-11;
- Valeria de Seta, Jlenia Toppi, Emma Colamarino, Rita Molle, Filippo Castellani, et. al. (2022). Cortico-muscular coupling to control a hybrid brain-computer interface for upper limb motor rehabilitation: A pseudo-online study on stroke patients. Front. Hum. Neurosci. 16.


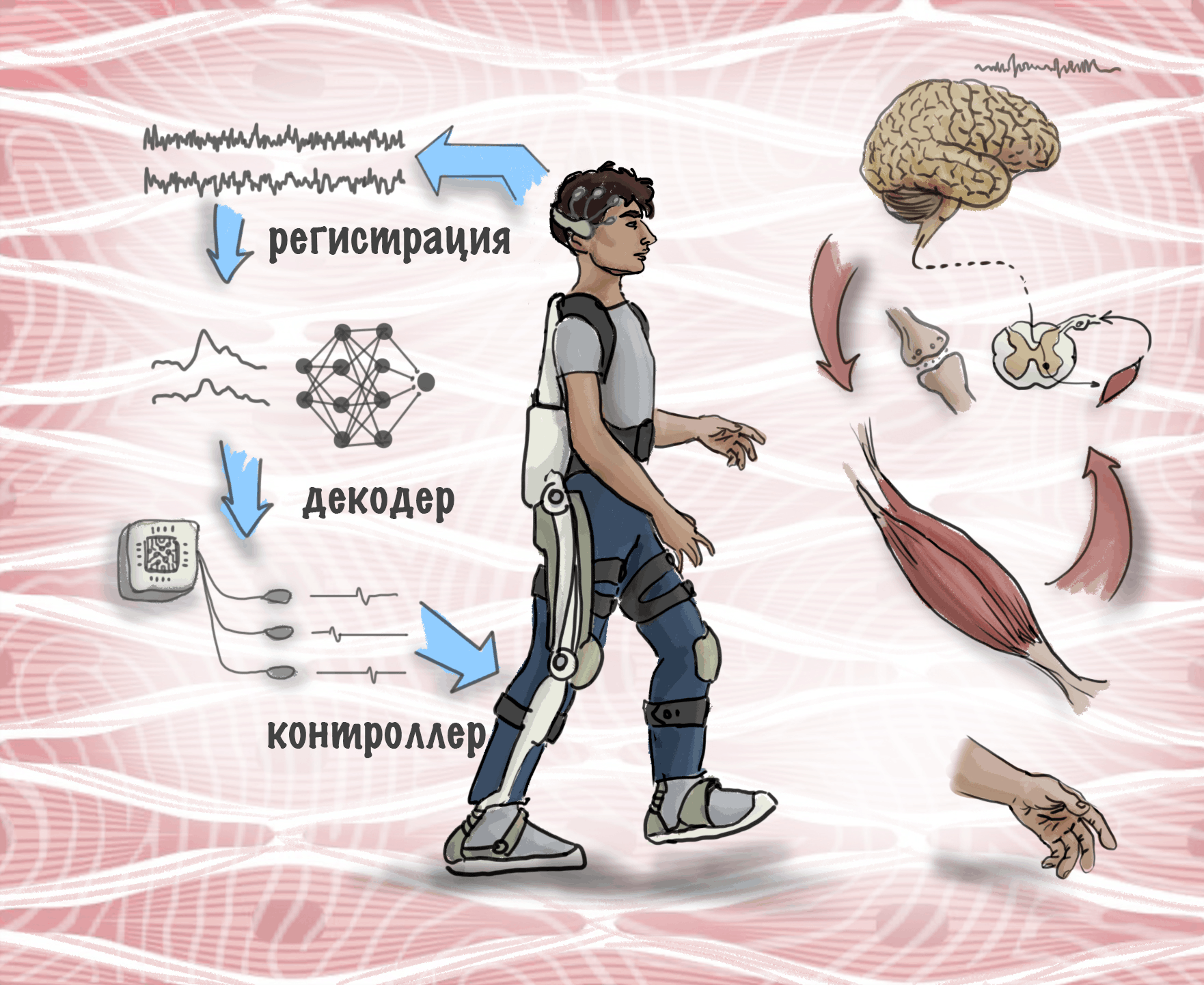{kind=link}
Комментарии
0Чтобы оставить комментарий, необходимо
войти